
反馈校正:对模型施加了反馈校正的过程,使预测控制具有很强的抗扰动和克服系统不确定性的能力。
滚动优化:滚动地优化控制序列,以得到和参考轨迹最接近的预测序列。
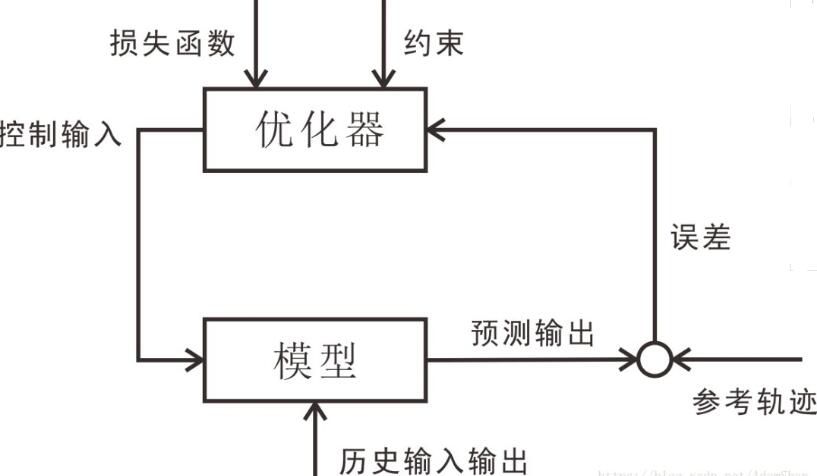
参考轨迹:即设定的轨迹。
下图表示模型预测控制的基本结构,由于模型预测控制基于运动模型进行优化,在PID控制中面临的控制延时问题可以再建立模型考虑进去,所以模型预测控制在无人车控制中具有很高的应用价值。
5.小结
在本结我们概述了无人驾驶系统的基本结构,无人驾驶软件系统通常被划分为三层:感知,规划和控制。从某种程度上而言,无人车在这种分层体系下就可以看作是一个“载人机器人”,其中,感知具体包括环境感知和定位,近年来深度学习的突破,使得基于图像和深度学习的感知技术在环境感知中发挥了越来越重要的作用,借助人工智能,我们已经不再局限于感知障碍物,而逐渐变成理解障碍物是什么,理解场景,甚至预测目标障碍物的行为,机器学习和深度学习的内容我们将在后面两章详细了解。
关于汽车电子就介绍完了,您有什么想法可以联系小编。









