
PID控制器是什么
我想每一个看到这里的人都对PID的概念有了足够的了解,我一遍遍叽歪比例积分微分没有任何意义。这里我只想说一些大家提的较少的‘重点’内容:
PID控制器是一个线性的控制器!从这里开始我们进入正题了,虽然若干年来PID已然成为了世界上使用最普遍的控制方法,也逐渐被人们神话到几乎可以控制一切………………但是,从理论上来说,只有‘线性的,符合要求的’被控系统才能在PID控制下实现良好的控制效果。
所以说,我们首先第一步,要保证我们的被控系统在被PID控制的区域‘表现为’一个线性系统才行。于是这里有人会说了,现实中没有哪个系统是线性的,自然,我们的四轴飞行器在大范围内是一个非常典型的非线性系统(随便按照理论推推模型就会出现漫天的三角函数),也就是说,我们‘仅’使用标准PID控制的话是不可能让四轴从各个姿态回到目标状态的过程都能保持稳定。于是这里出现我们使用PID时要注意的第一个问题:
我们的PID控制只能工作在四轴角度偏移不大的一个近似线性的区域内。这个区域没有定论,不过你要是飞机偏了90°的话想用PID调回到水平状态指定是非常危险的事情。PID的模型相关问题非常重要也比较费口舌,我们等下认真讨论,现在要先说另一个非常重要的非线性问题:
要保证我的控制通道与电机的输出力矩是线性的。如果我们的控制通道与电机输出力矩都不是线性的的话,我们的PID控制就很难起作用了,节省时间不举例子了,不明白的自行补脑吧,于是我这里要提醒大家的事情是:我们的航模电调调整的都是力矩而不是转速(虽然它叫做电子调速器),这是我们的福音,因为大家知道,螺旋桨产生的升力与转速的平方成正比,而角加速度与力矩成正比,正是因为我们的电调让电机产生的升力与我们输出的油门量成正比了我们才能使用PID控制器对四轴的姿态进行控制。这里可以看下我的四轴使用的四合一电调输出的升力与油门的对应曲线:
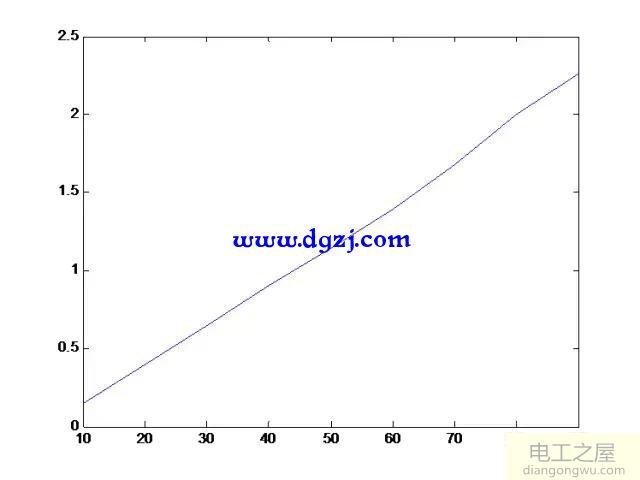
图中横坐标是输出油门的百分比,纵坐标是四个电机产生的总拉力(单位暂定kg),可以看到,具有非常好的线性关系,所以我们可以使用PID对大四轴实现比较好的控制。于是我们首先发现了第一个问题,有人反映小四轴不好调参数,因为小四轴没有专用的电子调速器,所以油门与输出力矩并不是严格线性的(这里我没有实践过,请大家随意批评指正),这时使用PID控制性能就会明显下降,当你的电机输出力矩与你的控制信号不是线性关系的时候,请先使用软件补偿的方法对油门做一下分段的线性仿射变化,再设计PID控制器。
不过对于大四轴而言貌似就不用那么麻烦了,那我们直接进入PID的控制模型环节。
PID控制器的数学模型
在标准的控制类书籍上PID算法是这么定义的:
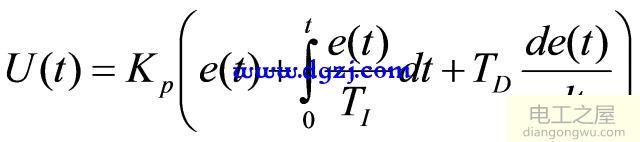
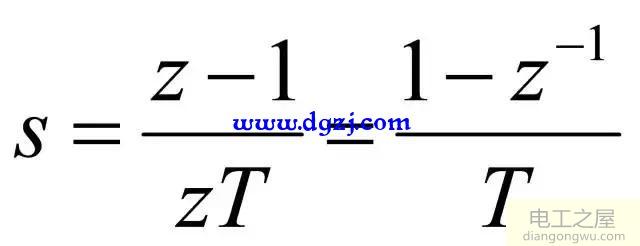
这个公式是连续系统用的,我们单片机的控制是用不了的,我们的单片机使用的是离散的控制模型也叫0阶保持器的离散系统,就是需要把上面的公式离散化,而这个离散化的过程我们使用的是后项差分法。首先把上面的积分传递函数转化为连续的s域模型:

使用后向差分法可以得到s域到z域的映射关系:
于是可以得到:
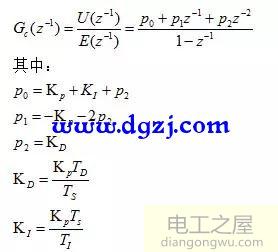
这里特地给出了Kp Ki Kd这三个参数,这三个参数就是大家最常看到的那个离散的PID公式,也就是说你在这里既可以使用Kp Ti Td的参数来建模也可以使用Kp Ki Kd的参数来建模,到这里就总算是可以把我们的传递函数放在系统中用自控原理的相应工具来分析了。分析之前要先声明一个事情,有人发现(比如在MWC和其他许多飞控中)用陀螺仪的输出来当做PID中的微分项,会取得比标准PID更好的控制效果,乍一看这么做与用前后两次欧拉角作差没有区别(因为角速度整好就是角度的微分),控制效果不一样就说不通了。
其实是这个样子的,如果我们在程序中做了非常好的线程安全的处理并且控制频率和姿态解算读陀螺的频率是一样的的情况下二者确实是没有任何差别的,但是大家的飞控都写的非常简单,姿态解算频率都高于控制频率,于是读到的陀螺仪的数据并不是‘当前使用的姿态前一时刻’的数据而是‘后一时刻’的数据,这时候PID控制的微分部分就不再是‘后项差分’而是‘前向差分’了(这就是我前面要强调使用后项差分法的原因),那这个时候就尴尬了,我们不能全部使用前向差分模型来建模(因为积分还是使用的后向模型)两边分开用又会出现模型阶次不匹配的问题,所以这时候是无法使用PID模型来考虑接下来的问题的,你使用的其实是两个独立的控制器并联,一个是角度的PI控制器,而另一个是角速度的P控制器,二者采样时间不一样,于是得当做两个独立的控制回路调整参数,这是使用这种控制器时的参数调整方法。也就道出了为什么部分情况下使用角度微分和角速度控制效果不一样的问题,这种方法固然是很好的(可以有效的降低振动),当然前提是你按照二者独立控制的思路来设计参数。但是很不幸,大家都没有这么做,依然是把整体作为PID控制器来考虑,那么,我只能说这是个近似的PID控制器了,手调固然可以(万能的实验调参啊)但是通过建模的方式算出优化的参数就不可能了。









