
PID控制器是一种最优控制。PID调节规律是连续系统动态品质校正的一种有效方法,它的参数整定方式简便,结构改变灵活(PI、PD、…)。
PID是闭环控制算法
因此要实现PID算法,必须在硬件上具有闭环控制,就是得有反馈。比如控制一个电机的转速,就得有一个测量转速的传感器,并将结果反馈到控制路线上,下面也将以转速控制为例。
PID是比例(P)、积分(I)、微分(D)控制算法
但并不是必须同时具备这三种算法,也可以是PD,PI,甚至只有P算法控制。我以前对于闭环控制的一个最朴素的想法就只有P控制,将当前结果反馈回来,再与目标相减,为正的话,就减速,为负的话就加速。现在知道这只是最简单的闭环控制算法。
PID控制器结构
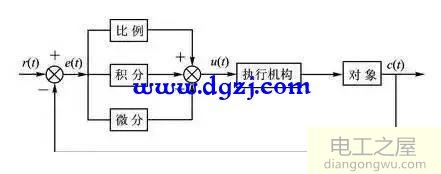
PID控制系统原理结构框图
对偏差信号进行比例、积分和微分运算变换后形成一种控制规律。“利用偏差,纠正偏差”。
模拟PID控制器









