
1、PID算法控制原理
将偏差的比例(Proportion)、积分(Integral)和微分(Differential)通过线性组合构成控制量。用这一控制量对被控对象进行控制,这样的控制器称PID控制器。
01:模拟PID控制原理
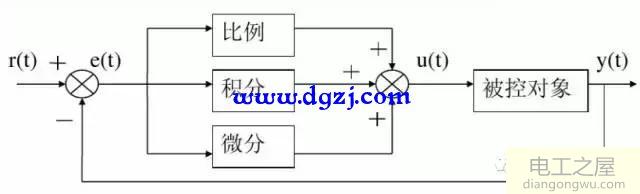
其中,r(t)是给定值,y(t)是系统的实际输出值,给定值与实际输出值的差值e(t)= r(t)- y(t)。e(t)作为PID控制器的输入。u(t)作为PID控制器的输出,也是被控对象的输入。所以,模拟PID控制器的控制规律为:

其中,Kp为控制器的比例系数;Ti为控制器的积分时间常数;Td为控制器的微分时间常数。
(1)比例部分:Kp*e(t)
在模拟PID控制器中,比例环节的作用是对偏差瞬间作出反应。偏差一旦产生,控制器立即产生控制作用,使控制量向减小偏差的方向变化。控制作用的强弱取决于比例系数Kp。Kp越大,控制作用越强,则过渡过程越快,控制过程的静态偏差也就越小。但是Kp越大,也越容易产生振荡,破坏系统的稳定性。
(2)积分部分:

从积分的数学表达式可知:只要存在偏差,则它的控制作用就不断增加。只有在偏差值为零时,它的积分才是一个常数。控制作用才是一个不会增加的常数。可见,积分部分可以消除系统的偏差。
积分环节虽然会消除静态误差,但是也会降低系统的响应速度,增加系统的超调量。积分时间常数越大,积分的积累越弱。这时,系统在过渡时不会产生振荡。但是,增大积分时间常数会减慢静态误差的消除过程,消除偏差所需的时间也较长,但可以减少超调量,提高系统的稳定性。
当积分时间常数较小时,则积分的作用较强。这时系统过渡时间中有可能产生振荡,不过消除偏差所需的时间较短。所以必须根据实际控制的具体要求来确定积分时间常数。
积分系数(积分增益)是指:Ki=Kp/Ti 。
(3)微分部分:Kp*Td*(de(t))/dt
控制系统除了期望消除静态误差外,还要求加快调节过程。在偏差出现的瞬间,或在偏差变化的瞬间,不但要对偏差量做出立即响应(比例环节的作用),而且要根据偏差的变化趋势预先给出适当的纠正。为了实现这一作用,可以在PI控制器的基础上加入微分环节,形成PID控制器。
微分环节的作用是阻止偏差的变化。它根据偏差的变化趋势(变化速度)进行控制。偏差变化的越快,微分控制器的输出就越大,并能在偏差值变大之前进行修正。微分作用的引入,有助于减小超调量、克服振荡,使系统趋于稳定。特别对高阶系统有利,它加快了系统的跟踪速度。但微分的作用对输入信号的噪声很敏感。对那些噪声较大的系统一般不用微分,或在微分起作用之前先对输入信号进行滤波。
微分部分的作用由微分时间常数决定。微分时间常数越大时,则它抑制偏差变化的作用越强;微分时间常数越小时,则它反抗偏差变化的作用越弱。微分部分显然对系统稳定有很大的作用。适当地选择微分时间常数,可以使微分作用达到最优。
微分系数是指:Kd= Kp*Td。
02:数字PID控制原理
因为在微机处理器里面是通过软件来实现PID控制算法的,所以必须将模拟PID控制器进行离散化处理,这样控制器只需根据采样时刻的偏差值计算控制量。因此,我们需要使用离散的差分方程代替连续的微分方程。假定采样时间T很短时(比如1ms),可以做如下处理:
(1)用一阶向后差分代替一阶微分;
(2)用累加(矩形法数字积分)代替积分。
即:推导得到:

数字PID控制算法分为位置式PID和增量式PID控制算法。
2、位置式PID控制算法
位置式PID控制算法框图:
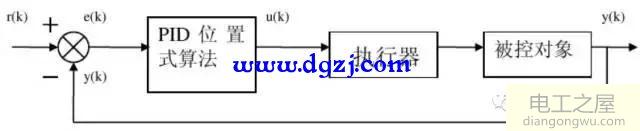
位置式PID控制器输出:

简化为:

这种算法的缺点是:由于这种算法每次输出均与过去状态有关。计算时需要对e(k)进行累加,容易造成积分饱和,单片机运算工作量大。又因为单片机计算输出的u(k)对应的是执行机构的实际位置,一旦单片机出现故障,输出的u(k)将大幅度变化,会引起执行机构的大幅度变化。这样可能对执行结构造成严重的损害,在实际应用中是不允许的。增量式PID控制算法就可以避免这种现象的发生。
3、增量式PID控制算法
增量式PID控制算法框图:

由位置式PID控制算法可以得到:
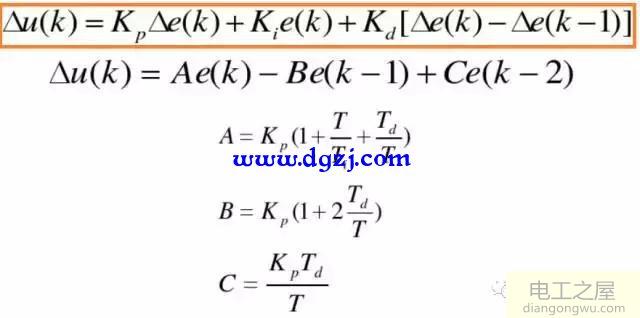
则有数字递推PID控制算法:
u(k)=u(k-1)+△u(k)
增量式PID控制算法优点:
(1)由于单片机输出是增量,所以误动作小;
(2)算法不需要累加,控制增量只与第k次的采样值有关;
增量式PID控制算法缺点:
积分截断效应大,有静态误差,溢出影响大等。









