
红外避障和循迹小车原理图
红外接收管内部带了一个具有红外光敏感特征的PN节,属于光敏二极管,但是它只对红外光有反应。无红外光时,光敏管不导通,有红外光时,光敏管导通形成光电流,并且在一定范围内电流随着红外光的强度的增强而增大。典型的红外接收管如图16-2所示。
图16-2 红外接收管

这种红外发射和接收对管在小车、机器人避障以及红外循迹小车中有所应用,所以暂提供一个原理图给大家作为学习之用,如图16-3所示。
图16-3 红外避障、循迹原理图
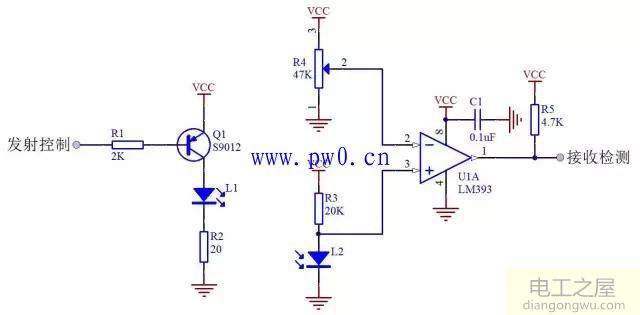
在图16-3这个原理图中,发射控制和接收检测都是接到我们单片机的IO口上。
发射部分:当发射控制输出高电平时,三极管Q1不导通,红外发射管L1不会发射红外信号;当发射控制输出低电平的时候,通过三极管Q1导通让L1发出红外光。
接收部分:R4是一个电位器,也就是“传说”中的滑动变阻器。我们通过调整这个滑动变阻器给LM393的2脚一个阈值电压,这个电压值大小可以根据实际情况来确定。而红外光敏二极管L2收到红外光的时候,会产生电流,并且随着红外光的从弱变强,电流会从小变大。当没有红外光或者说红外光很弱的时候,3脚的电压就会接近VCC,如果3脚比2脚的电压高的话,通过LM393比较器后,接收检测引脚输出一个高电平。当随着光强变大,电流变大,3脚的电压值等于VCC-I*R3,电压就会越来越小,当小到一定程度,比2脚的电压还小的时候,接收检测引脚就会变为低电平。
这个电路用于避障的时候,发射管先发送红外信号,红外信号会随着传送距离的加大逐渐衰减,如果遇到障碍物,就会形成红外反射。当反射回来的信号比较弱时,光敏二极管L2接收的红外光较弱,比较器LM393的3脚电压高于2脚电压,接收检测引脚输出高电平,说明障碍物比较远;当反射回来的信号比较强,接收检测引脚输出低电平,说明障碍物比较近了。
用于小车循迹的时候,必须要有黑色和白色的轨道。当红外信号发送到黑色轨道时,黑色因为吸光能力比较强,红外信号发送出去后就会被吸收掉,反射部分很微弱。白色轨道就会把大部分红外信号返回来。通常情况下的循迹小车,需要应用多个红外模块同时检测,从多个角度判断轨道,根据判断的结果来调整小车使其按照正常循迹前行。









