首先简单说明一下PID控制的基本原理。PID控制是自动化控制工程中应用很广泛的调节控制规律,不同于开环控制,PID控制是闭环控制,它的基本控制结构见下图。
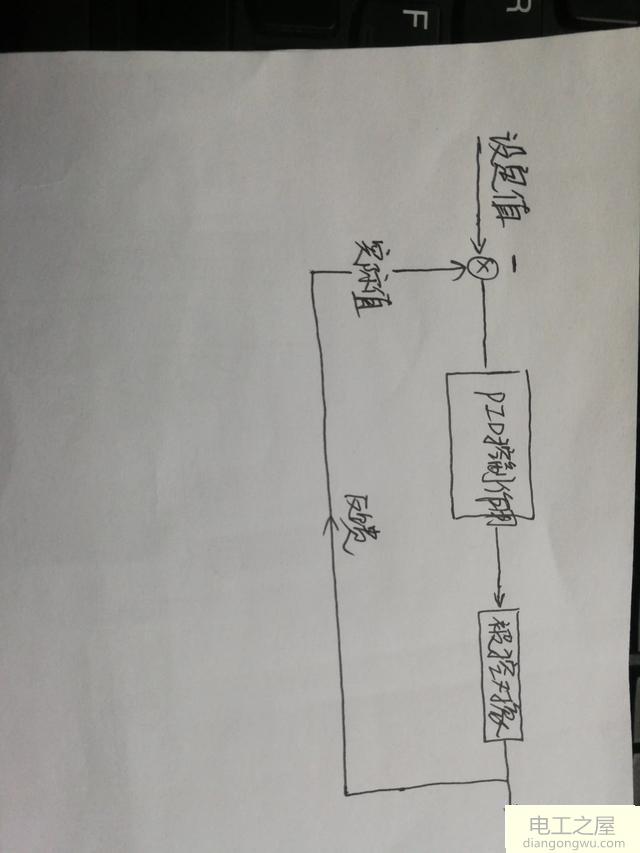
P比例作用是用来消除设定值和反馈的实际值之间的偏差,消除误差后再由积分I作用来消除稳态误差,而对于存在滞后的系统,通过微分D作用来达到提前预判的作用。
你所提到的PID输入进行变化,输出值和原来的相差了,我理解为PID输入设定值发生改变,PID输出值相应发生改变。就此理解来谈一下你说的情况。
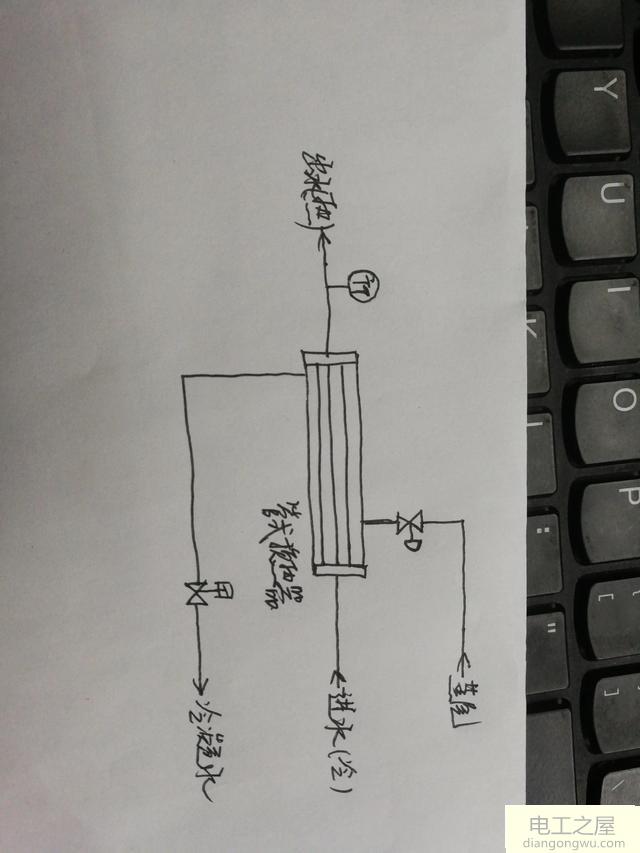
就我所接触到的PID调节实际应用中,可以分为以下两种工况。第一种工况:PID的输入设定值恒定不变,PID根据反馈回来的实际值和设定值之差进行作用,调节被控对象直到稳定。第二种工况:例如加热升温的情况,要求目标温度不能太快也不能太慢,按照一定的速率上升,这时就可以对PID输入的目标值进行处理,让它按照一定的速率变化。这种情况下,输入值发生变化,输出也会跟着变化,调节参数到合适值,系统还是很稳定的。PID的作用就是要响应变化的,所以发生变化没关系,会自动调节到稳定状态的。