PID控制的原理
确切说是PID调节器。工程上常常用在闭环系统中加入PID环节,对系统的传递函数进行修正,以快速的跟踪变化,消除稳态误差。PID调节器中的P为比例环节,起放大作用。I为积分环节,可以消灭稳态误差。D为微分环节,可以加快系统的反映。直流电机中加入PID调节器,可以实现快速启动。当系统中突发干扰、负载变化或者使用者主动调速是,PID环节可以帮助电机缩减过渡时间、进入新的稳定状态。
PID控制器原理是什么·
PID控制方式的具体流程是计算误差和温度的变化速度进行PID计算,先以P参数和误差计算出基础输出量,在根据误差的累积值和I参数计算出修正量,最终找出控制点和温度设定点之间的平衡状态,最后在通过温度的变化速率与D参数控制温度的变化速度以防止温度的剧烈变化。进行整定时先进行P调节,使I和D作用无效,观察温度变化曲线,若变化曲线多次出现波形则应该放大比例(P)参数,若变化曲线非常平缓,则应该缩小比例(P)参数。比例(P)参数设定好后,设定积分(I)参数,积分(I)正好与P参数相反,曲线平缓则需要放大积分(I),出现多次波形则需要缩小积分(I)。比例(P)和积分(I)都设定好以后设定微分(D)参数,微分(D)参数与比例(P)参数的设定方法是一样的。
简述常规PID控制的基本原理,并说明PID控制器的参数Kp,Ti,Td对控制质量各什么影响?
所谓PID指的是Proportion-Integral-Differential。翻译成中文是比例-积分-微分。
记住两句话:
1、PID是经典控制(使用年代久远)
2、PID是误差控制()
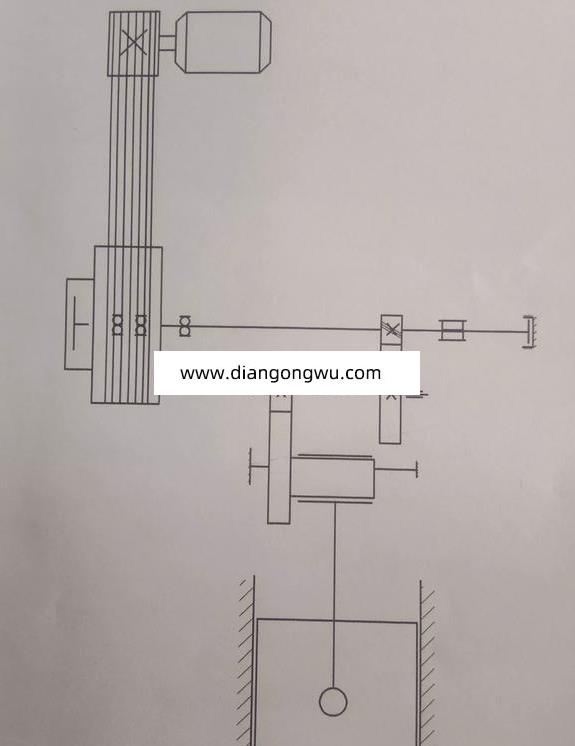
对液压泵转速进行控制还要:
1、变频器-作为电机驱动;2、差动变压器-作为输出反馈。
PID怎么对误差控制,听我细细道来:
所谓“误差”就是命令与输出的差值。比如你希望控制液压泵转速为1500转(“命令电压”=6V),而事实上控制液压泵转速只有1000转(“输出电压”=4V),则误差: e=500转(对应电压2V)。如果泵实际转速为2000转,则误差e=-500转(注意正负号)。
该误差值送到PID控制器,作为PID控制器的输入。PID控制器的输出为:误差乘比例系数Kp+Ki*误差积分+Kd*误差微分。
Kp*e + Ki*∫edt + Kd*(de/dt) (式中的t为时间,即对时间积分、微分)
上式为三项求和(希望你能看懂),PID结果后送入电机变频器或驱动器。
从上式看出,如果没有误差,即e=0,则Kp*e=0;Kd*(de/dt)=0;而Ki*∫edt 不一定为0。三项之和不一定为0。
总之,如果“误差”存在,PID就会对变频器作调整,直到误差=0。
评价一个控制系统是否优越,有三个指标:快、稳、准。
所谓快,就是要使压力能快速地达到“命令值”(不知道你的系统要求多少时间)
所谓稳,就是要压力稳定不波动或波动量小(不知道你的系统允许多大波动)
所谓准,就是要求“命令值”与“输出值”之间的误差e小(不知道你的系统允许多大误差)
对于你的系统来说,要求“快”的话,可以增大Kp、Ki值
要求“准”的话,可以增大Ki值
要求“稳”的话,可以增大Kd值,可以减少压力波动
仔细分析可以得知:这三个指标是相互矛盾的。
如果太“快”,可能导致不“稳”;
如果太“稳”,可能导致不“快”;
只要系统稳定且存在积分Ki,该系统在静态是没有误差的(会存在动态误差);
所谓动态误差,指当“命令值”不为恒值时,“输出值”跟不上“命令值”而存在的误差。不管是谁设计的、再好的系统都存在动态误差,动态误差体现的是系统的跟踪特性,比如说,有的音响功放对高频声音不敏感,就说明功放跟踪性能不好。
调整PID参数有两种方法:1、仿真法;2、“试凑法”
仿真法我想你是不会的,介绍一下“试凑法”
“试凑法”设置PID参数的建议步骤:
1、把Ki与Kd设为0,不要积分与微分;
2、把Kp值从0开始慢慢增大,观察压力的反应速度是否在你的要求内;
3、当压力的反应速度达到你的要求,停止增大Kp值;
4、在该Kp值的基础上减少10%;
5、把Ki值从0开始慢慢增大;
6、当压力开始波动,停止增大Ki值;
7、在该Ki值的基础上减少10%;
8、把Kd值从0开始慢慢增大,观察压力的反应速度是否在你的要求内

PID控制的原理是什么
简单来说,P是对系统进行比例调节(自己要用Matlab做实验),I是积分环节是调节系统的稳定性的,使其尽量小振荡或者不振荡。D是微分环节,是可以提高系统的响应输出时间。
PID控制的定义是什么
PID是比例积分微分的意思。P表示按偏差进行比例放大得到一个输出,这个无法消除余差,因此再加上积分,积分是按偏差累积的,只要有偏差就有大于(或小于)0的积分值(就是不会为0)。仅仅这样还不够,因为偏差变化有快慢之分,因此要用微分,微分就是计算偏差变化的速率。同时使用者三种控制规律来控制被控变量就是PID控制。它并不表示某一个控制规律,而是同时使用三种控制规律的综合..
PID控制的原理是什么、pid控制原理,就介绍到这里啦!感谢大家的阅读!希望能够对大家有所帮助!