单片机控制步进电机的工作原理
1. 步进电机的工作原理
该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。
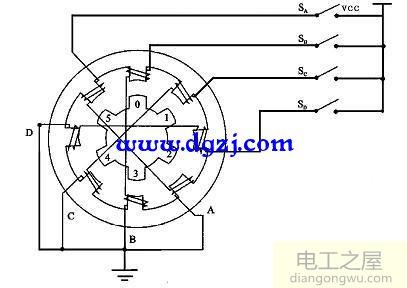
图1 四相步进电机步进示意图
开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。
当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。
四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。
单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示:

a. 单四拍 b. 双四拍 c八拍
图2.步进电机工作时序波形图
2.基于AT89C2051的步进电机驱动器系统电路原理
步进电机驱动器系统电路原理如图3:

图3 步进电机驱动器系统电路原理图
AT89C2051将控制脉冲从P1口的P1.4~P1.7输出,经74LS14反相后进入9014,经9014放大后控制光电开关,光电隔离后,由功率管TIP122将脉冲信号进行电压和电流放大,驱动步进电机的各相绕组。使步进电机随着不同的脉冲信号分别作正转、反转、加速、减速和停止等动作。图中L1为步进电机的一相绕组。AT89C2051选用频率22MHz的晶振,选用较高晶振的目的是为了在方式2下尽量减小AT89C2051对上位机脉冲信号周期的影响。
图3中的RL1~RL4为绕组内阻,50Ω电阻是一外接电阻,起限流作用,也是一个改善回路时间常数的元件。D1~D4为续流二极管,使电机绕组产生的反电动势通过续流二极管(D1~D4)而衰减掉,从而保护了功率管TIP122不受损坏。
在50Ω外接电阻上并联一个200μF电容,可以改善注入步进电机绕组的电流脉冲前沿,提高了步进电机的高频性能。与续流二极管串联的200Ω电阻可减小回路的放电时间常数,使绕组中电流脉冲的后沿变陡,电流下降时间变小,也起到提高高频工作性能的作用。
3.软件设计
该驱动器根据拨码开关KX、KY的不同组合有三种工作方式供选择:
方式1为中断方式:P3.5(INT1)为步进脉冲输入端,P3.7为正反转脉冲输入端。上位机(PC机或单片机)与驱动器仅以2条线相连。
方式2为串行通讯方式:上位机(PC机或单片机)将控制命令发送给驱动器,驱动器根据控制命令自行完成有关控制过程。
方式3为拨码开关控制方式:(https://www.dgzj.com/ 电工之家)通过K1~K5的不同组合,直接控制步进电机。
当上电或按下复位键KR后,AT89C2051先检测拨码开关KX、KY的状态,根据KX、KY 的不同组合,进入不同的工作方式。以下给出方式1的程序流程框图与源程序。
在程序的编制中,要特别注意步进电机在换向时的处理。为使步进电机在换向时能平滑过渡,不至于产生错步,应在每一步中设置标志位。其中20H单元的各位为步进电机正转标志位;21H单元各位为反转标志位。在正转时,不仅给正转标志位赋值,也同时给反转标志位赋值;在反转时也如此。这样,当步进电机换向时,就可以上一次的位置作为起点反向运动,避免了电机换向时产生错步。
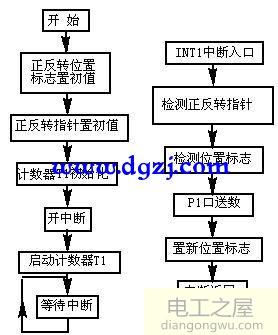
图4 方式1程序框图
方式1源程序:
MOV 20H,#00H ;20H单元置初值,电机正转位置指针
MOV 21H,#00H ;21H单元置初值,电机反转位置指针
MOV P1,#0C0H ;P1口置初值,防止电机上电短路
MOV TMOD,#60H ;T1计数器置初值,开中断
MOV TL1,#0FFH
MOV TH1,#0FFH
SETB ET1
SETB EA
SETB TR1
SJMP $
;***********计数器1中断程序************
IT1P: JB P3.7,FAN ;电机正、反转指针
;*************电机正转*****************
JB 00H,LOOP0
JB 01H,LOOP1
JB 02H,LOOP2
JB 03H,LOOP3
JB 04H,LOOP4
JB 05H,LOOP5
JB 06H,LOOP6
JB 07H,LOOP7
LOOP0: MOV P1,#0D0H
MOV 20H,#02H
MOV 21H,#40H
AJMP QUIT
LOOP1: MOV P1,#090H
MOV 20H,#04H
MOV 21H,#20H
AJMP QUIT
LOOP2: MOV P1,#0B0H
MOV 20H,#08H
MOV 21H,#10H
AJMP QUIT
LOOP3: MOV P1,#030H
MOV 20H,#10H
MOV 21H,#08H
AJMP QUIT
LOOP4: MOV P1,#070H
MOV 20H,#20H
MOV 21H,#04H
AJMP QUIT
LOOP5: MOV P1,#060H
MOV 20H,#40H
MOV 21H,#02H
AJMP QUIT
LOOP6: MOV P1,#0E0H
MOV 20H,#80H
MOV 21H,#01H
AJMP QUIT
LOOP7: MOV P1,#0C0H
MOV ; 20H,#01H
MOV 21H,#80H
AJMP QUIT
;***************电机反转*****************
FAN: JB 08H,LOOQ0
JB 09H,LOOQ1
JB 0AH,LOOQ2
JB 0BH,LOOQ3
JB 0CH,LOOQ4
JB 0DH,LOOQ5
JB 0EH,LOOQ6
JB 0FH,LOOQ7
LOOQ0: MOV P1,#0A0H
MOV 21H,#02H
MOV 20H,#40H
AJMP QUIT
LOOQ1: MOV P1,#0E0H
MOV 21H,#04H
MOV 20H,#20H
AJMP QUIT
LOOQ2: MOV P1,#0C0H
MOV 21H,#08H
MOV 20H,#10H
AJMP QUIT
LOOQ3: MOV P1,#0D0H
MOV 21H,#10H
MOV 20H,#08H
AJMP QUIT
LOOQ4: MOV P1,#050H
MOV 21H,#20H
MOV 20H,#04H
AJMP QUIT
LOOQ5: MOV P1,#070H
MOV 21H,#40H
MOV 20H,#02H
AJMP QUIT
LOOQ6: MOV P1,#030H
MOV 21H,#80H
MOV 20H,#01H
AJMP QUIT
LOOQ7: MOV P1,#0B0H
MOV 21H,#01H
MOV 20H,#80H
QUIT: RETI
END