S-bus为futaba使用的串行通信协议。实际上为串口通信。但是有几点需要注意:
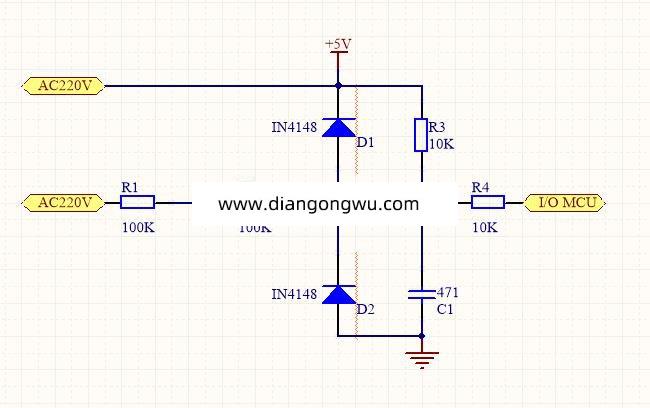
在大端小端上,网上资料都说的不是很清楚;跟TTL串口信号相比,S-bus的逻辑电平是反的,需用如下电路对电平反相,再借到串口接收的Rx管脚就可以了;
一、协议说明:
串口配置为波特率100kbps,8位数据,偶校验(even),2位停止位,无流控。
说明了S-bus帧格式。每帧25个字节,按照如下顺序排列:
[startbyte] [data1] [data2] .... [data22] [flags][endbyte]
起始字节startbyte = 11110000b (0xF0),但实际上用STM32(据说ARM核)收到的是0x0F。中间22个字节就是16个通道的数据了,为什么是16个通道?因为22x8=11x16,每个通道用11bit表示,范围是0-2047。不信看波形图:
什么,还看不清?
两帧之间的时间间隔4ms(高速模式),约7ms一帧。
基本而言,data1为ch1的低8位,data2的低3位为ch1的高三位,data2的高5位是ch2的低5位,data3的低6位是ch2的高6位,以此类推,如下图所示:
flags的结构如下所示:
flags:
bit7 = ch17 = digital channel (0x80)
bit6 = ch18 = digital channel (0x40)
bit5 = Frame lost, equivalent red LED on receiver (0x20)
bit4 = failsafe activated (0x10)
bit3 = n/a
bit2 = n/a
bit1 = n/a
bit0 = n/a
endbyte为0x00。
一、程序实现:
在STM32中的具体实现,除了如上述内容配置串口参数,还需要写好中断函数,写好解析函数。思路很简单,利用间隔时间来区分两帧,收到一帧数据后,做如下检查:
字节数够不够?第一个字节是不是0x0f?最后一个字节是不是0x00? 检查flag中的标志位
举个中断函数栗子:
void UART4_IRQHandler(void)
{
static uint8_t byteCNT = 0;
static uint32_t lastTime = 0;
uint32_t curTime;
uint32_t interval = 0;
HAL_NVIC_ClearPendingIRQ(UART4_IRQn);
//如果时间间隔大于3毫秒,则认为是新的一帧
if(lastTime == 0)
{
curTime = HAL_GetTick();
lastTime = curTime;
}
else
{
curTime = HAL_GetTick();
interval = curTime - lastTime;
lastTime = curTime;
if(interval >= 3)
{
if(byteCNT == 25 && uart4_cache1[0] == 0x0f && uart4_cache1[24] == 0x00)
{
rc_captured = 0;
memcpy(uart4_cache2, uart4_cache1, byteCNT);
rc_captured = 1;
}
byteCNT = 0;
}
}
if(RESET != __HAL_UART_GET_FLAG(&huart4, UART_FLAG_ORE))
{
__HAL_UART_CLEAR_FLAG(&huart4, UART_FLAG_ORE);
uart4_cache1[byteCNT++] = huart4.Instance->DR;
}