
图2 使用图形化标定和诊断工具CANape优化PID控制器
为了控制ECU标定的时间和成本,工程师和技术员通常会依赖可以灵活读写变量和内存的强大的工具和标准。为此,在90年代出现了CAN标定协议(CCP),当时CAN总线是汽车中唯一的主流总线。CCP后来被指定为一种交叉OEM标准。然而,随着汽车电子的持续发展,其它总线系统诸如FlexRay、LIN、MOST等也开始成为主流。但是,CCP仅限于CAN网络应用,所以在其它潜在领域的应用局限日益增加。这样就导致了其后继协议XCP的出现。
通用的标准协议
与CCP一样,“通用测量与标定协议”(XCP)也是源于自动化和测量系统标准化协会(ASAM),它在2003年被定为标准。其中的“X”代表可变的和可互换的传输层。XCP通过双层协议将协议和传输层完全独立开,它采用的是单主/多从结构。根据正在讨论的不同的传输层,XCP协议可能指的是XCP-on-Can、XCP-on-Ethernet、XCP-on-UART/SPI 或XCP-on-LIN,如图3所示。
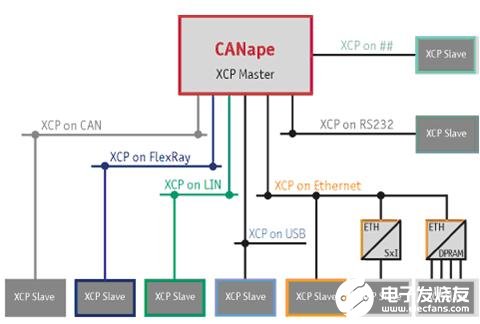
图3 传输层和协议层的隔离使得XCP可以利用大量的硬件接口
XCP主设备可以和不同的XCP从设备同时通信。这些XCP从设备包括:
·ECU或ECU原型
·测量和标定硬件,如调试接口或内存仿真器
·快速控制原型硬件
·HIL/SIL系统
为了满足作为针对大量不同应用的通用的通信解决方案的挑战,ASAM工作组强调了下列XCP设计准则:最小的资源使用(包括ECU中的RAM、ROM和必需的运行时资源),高效的通信,轻松实现XCP Slave,需要较少配置工作的即插即用性能,较少的参数,以及可伸缩性。









