
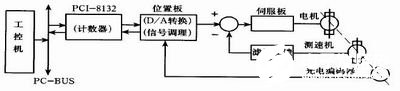
图2伺服控制结构简图
速度环的反馈信号取自测速发电机,反馈环节中加入滤波是为滤除低速时的谐波。位置环中位置传感元件——光电编码器将产生的电脉冲反馈给位置板经信号调理后给PCI-8132中的减法计数器,于是每来一个脉冲,计数器就从目标值减去1,直到计数器的内容为0,伺服电机转到目标位置而停止旋转。
恒压控制原理:差压式电容薄膜规、IEEE488数据采集卡、工控机、8132电机控制卡、位置/伺服控制卡、电机、导轨平动机构、活塞、液压油和波纹管共同组成了一个负反馈恒压自动调节的闭环控制系统。在流量测量过程中,参考室内的气体压力不变,当有气体流出变容室时,引起变容室的压力发生变化,在变容室与参考室之间产生压差△p,计算机循环检测这一压差信号。计算机根据压差值△p的大小,采用预先设定的控制算法计算出相应的电机转速调整量,并输出到位置控制卡,使电机驱动卡根据该电压信号重新驱动伺服电机,使伺服电机的转速得到了调整。电机驱动活塞在油室中运动,改变变容室的容积,使变容室与参考室之间的差压值△p维持在零附近,使得变容室的压力p基本上保持恒定。
系统的控制算法
本系统采用时间最优(B-B控制)与积分分离PID控制的双模控制算法。时间最优控制可加快调节的作用,而PID控制则保证跟踪精确度与稳态误差满足要求。时间最优控制模式为
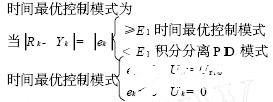
式中:E1为时间最优控制偏差门限;Rk,Yk,ek,Uk为第k次采样时的设定值、检测值、偏差值、计算机输出值;Umax为计算机输出的最大值。









