
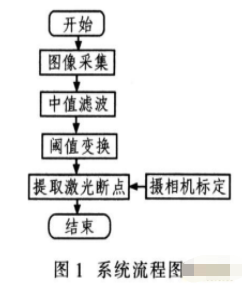
系统实现有相机标定、图像采集、中值滤波、阈值变换、提取激光断点、计算钢板宽度等步骤,如图1所示。
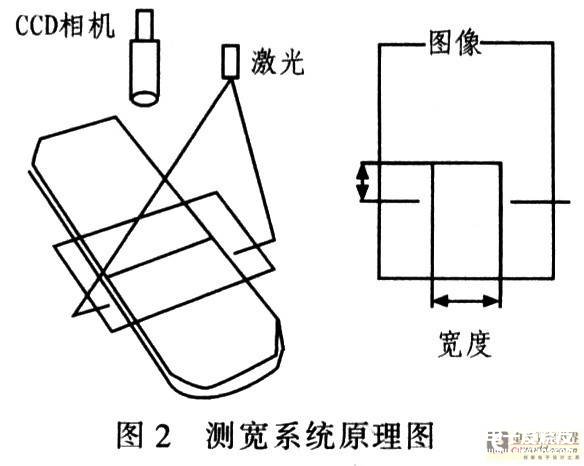
摄像机标定和图像处理,具体如下:首先激光器照射到钢板上,由千兆网相机拍照,经千兆网卡输入计算机,图像处理后获得激光断点的两个图像坐标。由标定得到的数学模型获得激光断点的空间坐标。根据勾股定理求得该两点之间线段的长度,现场有凹槽同定钢板,可不考虑钢板倾斜,该线段的长度即为钢板的宽度。图2为测宽系统原理图。
2.1 摄像机标定
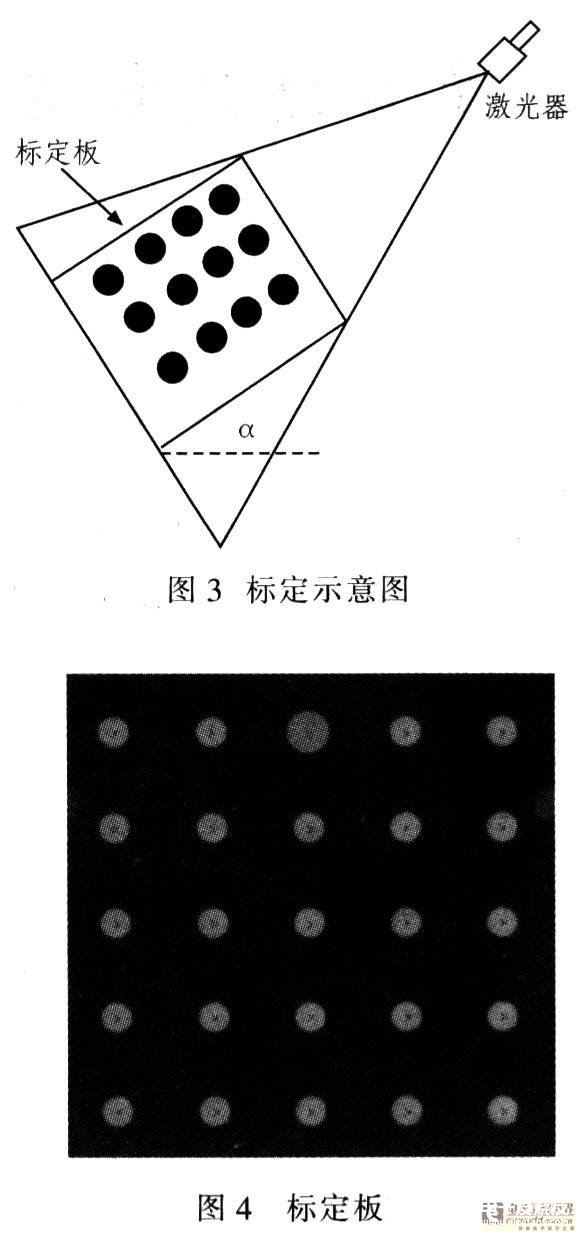
摄像机标定是指由世界坐标系中标定点以及对应图像像素坐标导出摄像机矩阵,并估计摄像机的内部参数。由于无论钢板厚度如何变化,钢板始终和激光面有条交线,即钢板宽度方向。与z轴方向无关,因此使用平面标定,如图3所示。将标定板(图4)放在激光面上,以垂直于标定板的方向为z轴,以平行和垂直于钢板宽度的方向在标定板上建立平面直角坐标系。选取圆的中心为标定点,两个相邻圆心之间的距离是16 mm,根据选取的坐标系,这些标定点在激光面上的位置是已知的,通过获取其对应的图像坐标确定摄像机的12个内外参数,从而完成标定工作。
[page]
由一组已知的世界坐标系的点以及对应在图像坐标系的点可以确定两个方程,因此,要确定摄像机的内外参数,需至少知道6组这样的点,而所采用的靶标可以提供充足的特征点,利用最小二乘法确定各个摄像机的内外参数。从透影的角度看,图像坐标与世界坐标一定存在某种关系。由应用光学理论可知,在完全理想的情况下,图像坐标(x,y)和世界坐标(X,Y,Z)(假设Z=0)应是比例关系。然而由于存在畸变,以及CCD摄像机安装的误差(与光轴不垂直),使这一比例关系发生改变,而导致它们存在非线性关系。这一对应关系根据精度要求的不同可采用不同的模型描述,根据问题的实际情况,用二元二次多项式简化模型就可精确描述,建立的数学模型如下:









