

3.2 测速算法
在相距2 m的两个道路断面上安装两个线阵CCD摄像机,如图3所示。选用的线阵CCD摄像机线速率为1 000线/s,分辨率为1 024:像素。
对两个CCD像机的图像序列进行相关匹配分析,从而获得同一个目标在两个图像序列中的时间差,利用该时间差和两个摄像机的距离,根据速度公式v=s/t即可得到目标车辆的行驶速度。
4 工程应用
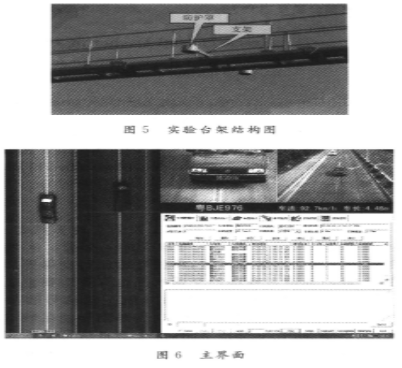
为了验证基于线阵CCD的交通信息采集和检测系统的可靠性和实时性,对某省级公路进行检测实验。线阵CCD成像系统放置在道路上方,如图5所示,检测范围为同方向3个车道共11.25 m,对过往车辆能实时正确触发,车牌识别效果较好,测速较为准确,如图6所示。系统在运行过程中稳定可靠,实时性高,软件使用方便。
5 结 语
设计并实现了一种基于线阵CCD的交通信息采集和检测系统。该系统利用线阵CCD连续快速记录通过检测断面的车辆的线阵图像,并从该序列线阵图像中获取车牌号码、车辆存在、车辆速度、车辆类型、交通占有率和流量等各种交通参数,并向监控中心实时传递其所需要的数据信息。该系统在实际工程中使用效果良好。
责任编辑:gt
关于测量仪表就介绍完了,您有什么想法可以联系小编。









