
3 多项式插值亚像素细分的精定位
运用Sobel细化算子改进的方向模板获取边缘点的梯度方向,可采用已知的边缘点的梯度方向近似代替未知的亚像素点的梯度方向,并在该方向上进行二次多项式插值得到边缘的亚像素位置。
对于灰度图像中任意点的梯度幅值用R表示,设R0为边缘点P0(m,n)的灰度梯度方向的模,R-1,R1分别是在梯度方向上与P0相邻的两像素点P-1,P1的梯度幅值,经推导可得亚像素点的坐标(xe,ye)为:
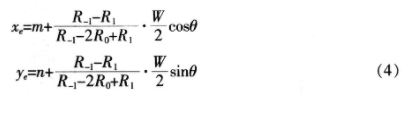
式中:W为相邻像素点到边缘点距离,θ为梯度方向与x轴正向夹角。
由式(4)可得出,亚像素细分定位边缘的前提条件为:R0》R-1且R0》R1。
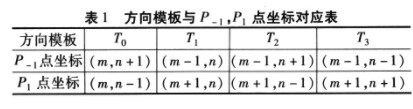
采用扩展的Sobel细化算子搜索单像素边缘,在搜索过程中,剔除边缘点梯度方向的非极大值,从而保证亚像像素细分定位的前提条件成立。方向模板与P-1,P1点坐标对应表如表1所示。
4 实验与结果分析
为了验证该算法,提取在线实时采集的微小零件图像进行实验。
(1)可扩展的Sobel细化算子的验证 引入灰阶Sobel算子后,得到的边缘图仍是灰阶图像,此时采用Sobel算子处理,得到边缘的边缘图。在新的边缘图上,原边缘的两侧得到新的边缘,而中间部分却变成背景,且其宽度小于原边缘。利用该特点细化原边缘,即将原边缘减去新边缘图,再将结果中与负的部分对应的边缘变为零,最后得到接近单像素宽的边缘图,从而达到细化边缘的效果,如图2所示。









