
4.3.3 陀螺零位的标定
取天北西,天南东,地南西,地北东4个位置,每个位置静态测试时间约20 min。设置4个标志位分别对应4个位置,然后将4个位置的数据分别存入内存数组中。将存入内存数组中的4个位置的数据分别带入(1)式得到陀螺零位。陀螺零位为4个位置陀螺输出的算术平均值(Dx0)。

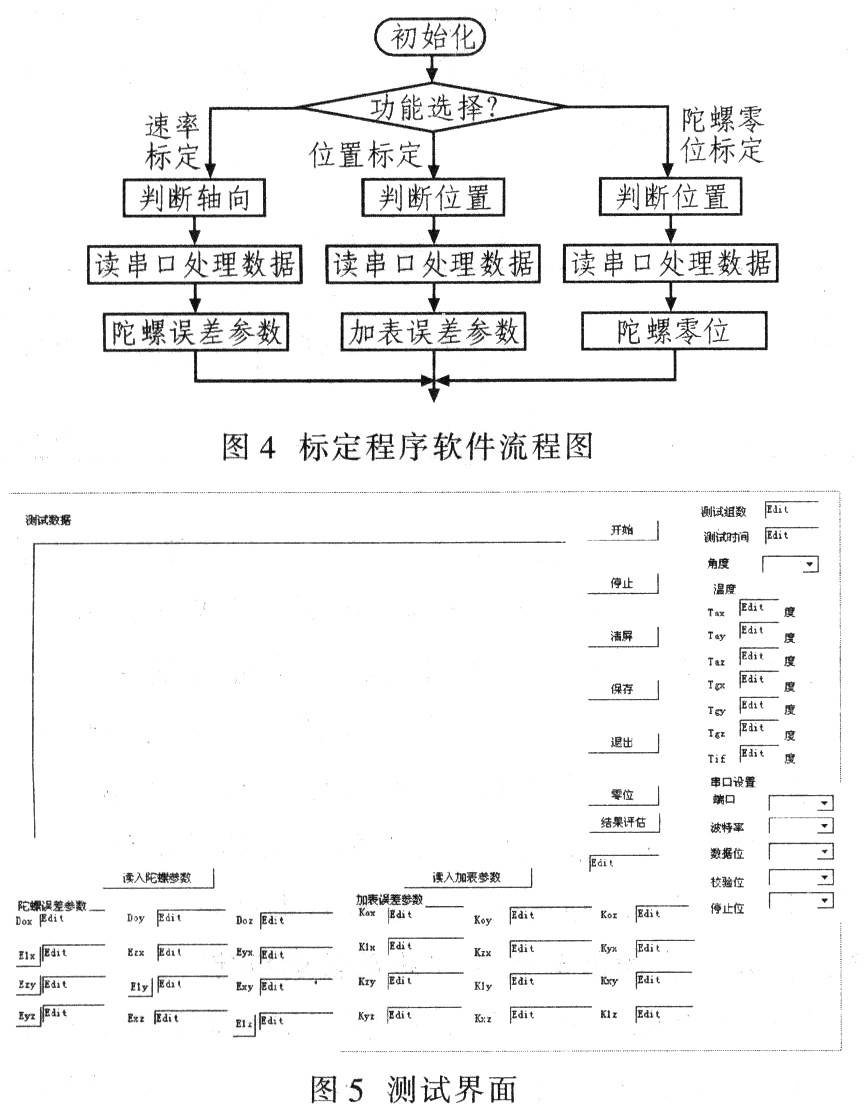
4.3.4 程序设计流程
标定测试共分为3步:①位置标定,完成对加速度计的标定;②速率标定,标定陀螺的安装误差和标度因数;(9陀螺常值标定。图4为总程序设计流程。按照图4的流程,设计图5所示的测试软件。设计中首先判断功能.选择所需的功能,只需设置3个标志符,每个标志符对应相应的功能。具体测试功能中,建立3个类,各个类编写各自的测试功能。位置标定时,由于位置比较多,对每一个位置都应设置各自的标志符,采集到的数据存储在内存中固定位置。这样处理数据时只需读取相应位置,避免误操作,缩短操作时间。在速率标定时,设置3个全局变量分别表示3个轴,同时在补测时,可直接将旧数据覆盖新数据。陀螺零位测试时,由于测试时间较长,在测试初始化中需占用的数组存储空间较大,数据处理部分和位置标定差不多。图5是测试界面。
5 结果评估
将IMU组合置于平板上,利用所测得的陀螺和加表的各项误差系数,根据陀螺和加表的误差方程,求得此时陀螺和加表在标得的误差系数下的输入,即陀螺各轴敏感的地球自转角速度和加表各轴敏感的重力加速度,然后与理想的地球自转角速度及重力加速度相比较,评估标定结果。如果相差在陀螺和加表的精度允许范围内,说明标定结果比较满意。









