
3、 系统硬件设计
3.1硬件框图,如图1所:
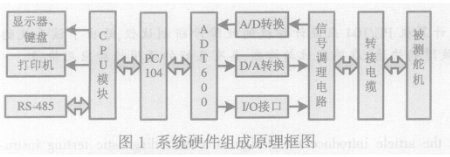
系统核心模块采用SBS公司的SCM/SuperPT2,它采用Geode™ MMX™ with I/O Companion CX5530A™的CPU,16 KB L1反写缓存;两个串口,波特率可由软件控制,其中COM2可设置为RS-485方式;一个并口;硬件平台关键是PC/104总线的扩展,通过数据缓冲和相应的逻辑控制,扩展出符合PC/AT协议的PC/10总线,它是扩展其他外设的基础。系统在PC/10总线基础上扩展了2M Flash、键盘接口、并口、显示屏和通用串行码采集接口。采集模块选用SBS公司的SysExpanModule/ADT600,此模块具有12位的分辨率,最大100KHz的采样率,模拟输入共有16通道,最大±10V输入;4通道模拟输出;24通道TTL/CMOS兼容I/O;3个16位、最大10MHz的定时/计数器;信号条理部分主要是将待测试信号变换成适合ADT600采集的信号[2]。
3.1.1 定时/计数器的配置
系统要求输出频率为5~13Hz的信号,则周期为200ms到80ms左右,如果采取1ms定时进行D/A转换的办法,最小的一个周期输出80个点,经过实际测试,能够满足测试对象对模拟激励信号的要求;另外在采集测试对象执行机构的控制信号时采用1ms定时采集的办法,也能满足最后数据判断的要求,因此定时器定时时间为1ms(即定时器的输出时钟为1KHz)。
3.1.2 D/A模块
在本设计中,我们选择SBS公司的SysExpanModule/ADT600数模转模块[2]。它是一种双12位电流输出的DACS(数据收集与控制系统),具有以下特点:较宽的工作电压(12V~15V);抗电源电压干扰性能好;紧凑的封装形式;低增益误差。它可以和大多数的微处理器配合使用,能够兼容TTL、CMOS电平。通过独立的参考电压和反馈电阻,还能够提供四象限的乘法器功能。其内部主要包括三个部分:控制逻辑电路、A路数模转换电路和B路数模转换电路。其中逻辑控制电路通过简单的三个控制信号:CSA,CSB及WR来选择相应的模数转换器,同时锁存需要转换的数据。A路数模转换电路的基本控制原理为:通过CSA与WR控制信号,将12位的转换数据一次锁存入A路转换电路的数据寄存器中,A路转换电路开始进行数模转换,将转换后的模拟量输出。B路转换电路的控制原理与A路类似。









