
基于这一观察发现,将髋关节移出圆形轮圈中心并将连续运动模式改为其他运动模式,即能达到轮模式向腿模式的转换。
这激发了我们去设计一种能直接控制圆形轮圈和髋关节的相对位置的模式,从而它既能进行轮运动又能进行腿运动。由于圆形轮圈是一个二维的对象,实现这一目标的最直接的方法是再增加一个自由度(DOF),沿着运动方向调节髋关节相 对圆形轮圈的位置。两个自由度的运动也互相形成直角。此外,无论是轮模式还是腿模式都能有效运行同一组的驱动功率。
机电一体化
我们采用NI CompactRIO嵌入式控制系统作为机器人控制器,它包括一个400MHz 的实时处理器和3M 现场可编程门阵列(FPGA)。FPGA直接连接NI C系列I/O 模块,这些模块能从载板传感器和激励器获得数据。对于模拟I/O我们采用NI 9205和NI 9264I/O模块,对于数字I/O采用NI 9401和NI 9403I/O模块。FPGA与实时处理器相连,并通过IEEE 802.11无线方式与电脑进行通讯。
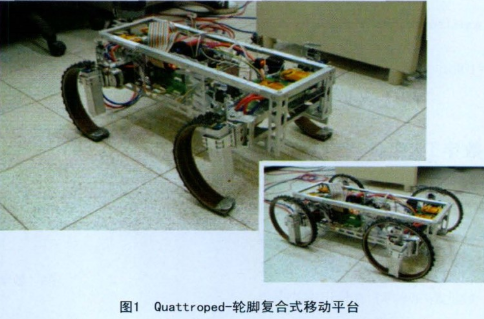
图1. Quattroped - 腿轮混合式移动平台
机器人传感器包括:马达和功率放大器上用于健康监测的温度传感器;用于电源管理的电压和电流测量传感器;用于腿轮配置校准的霍尔(Hall)效应传感器;用于身体状态测量的6轴惯性制导仪和2轴测斜仪;用于离地间隙测量的3个红外距离传感器。全球定位系统、视觉和激光测距仪等各种传感器也被用于提高机器人的感应能力。机器人上的激励器包含8个用于驱动的直流有刷电机,2个用于前腿车轮转动的高扭矩RC伺服电机,用于轮腿切换的四个小型RC伺服电机和四个小型直流有刷电机。









