
软件
三个运行LabVIEW 的计算核心(PC, 实时系统和FPGA)负责不同的任务。用户操作PC,将高级指令(如机器人应该以轮模式还是腿模式运行)发送到NI CompactRIO 控制器。控制器以1kHz的循环速率运行,将关于机器人健康的重要信息发送回来,并在PC上记录状态数据。机器人软件架构包括各种状态机,每个状态代表一种机器人行为。其他需要高速信号交换的算法以10 kHz的循环率在FPGA上运行。包括直流电动机、编码器读数以及基于PWM的RC伺 服命令的比例-积分-微分(PID) 控制。
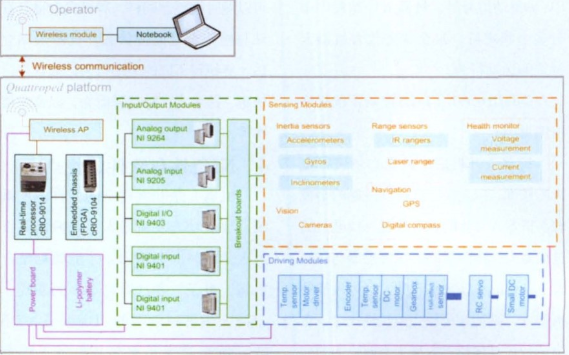
图2. Quattroped 控制平台结构
机器人通电后,我们进行电机校准,定义机器人每条腿轮上两个活跃自由度的完全几何配置。通过匹配安装在机器人身体上的霍尔效应传感器和安装在腿轮内部磁铁的相对位置实现校准。我们可以在腿模式或轮模式下操作经校准过的机器人,这取决于当前RIM配置(即为车轮或半圈腿模式)。另外,我们也可以通过腿轮转换来改变腿轮配置。机器人轮模式下的行为包括站立、行驶和入座。站立和入座为两个瞬态状态,用以过度最初地面配置和行驶行为。在行驶行为中,前进速度和转弯速率都连续可调。同样,当机器人在腿模式下运作时,站立和入座行为也属于瞬时状态。站立起来后的机器人可以执行各种行为,包括步行、小跑、跨步、跨越障碍和爬楼梯。
NI软硬件的益处
在一般情况下,机器人属于高自由度的复杂系统。机器人的成功发展需要花费时间和精力来妥善整合各种机械、电气和计算机系统。来自国立台湾大学BioRoLa团队,主要由拥有机械工程背景的学生组成,他们需要一个可靠、模块化、易于使用及良好集成的平台。









