
测速电路由附着在电机转子上的光码盘及电脉冲放大整形电路组成。电脉冲的频率与电机的转速成固定的比例关系,光码盘输出的电脉冲信号经放大整形为标堆TTL电平从PIC16F874单片机引脚RC0/T1CKI输入,通过TMR1计数器进行计数,从而算出转速,将这个转速与预置转速进行比较,得出差值,PIC16F874通过对这个差值进行PI运算,得出控制增量,在CCP2送出晶闸管控制角的大小,从而改变加在电机两端的有效电压,最终达到控制转速的目的。
4 系统软件设计
将速度闭环控制设计成为典型I系统,即PI调节器,用来调节晶闸管控制角时间Td,其控制算法为:
其中a1=Kp,Kp-控制器的比例系数,T1-积分时间常数,Ti-采样周期。
本系统的软件设计模块主要包括CCP1上升沿捕捉模块,CCP1下升沿捕捉模块,控制角设定值A/D转换模块,测速电路脉冲定时计数模块,PI调节器模块,CCP2比较输出模块等,各模块程序流程图的关系如图3所示。
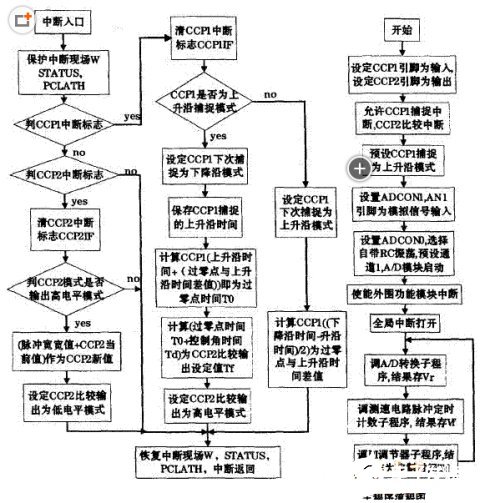
图3 CCP1,CCP2模块中断程序流程图
假设我们得到过零点时间为Tσ,晶闸管控制角时间为Td,那么送入CCP2寄存器CCPR2H:L比较值Tf=Tσ+Td,比较一致后,将在CCP2引脚上输出高电平,使晶闸管导通,然后根据所需的触发脉宽值,再次修改CCPR2H:L值,使输出高电平触发脉冲维持一定的时间后再回到低电平,这样就完成一个双向晶闸管触发脉冲输出。
5 结束语
本系统软件、硬件设计充分利用了PIC16F874单片机捕捉、比较、模/数转换模块的特点,以及单片机振荡频率高,响应快等优点,设计出相应的触发电路,使得PIC16F874单片机的模/数转换模块能迅速、准确的转换速度设定值;CCP1模块能精确捕捉交流电的过零点;测速电路的定时计数模块能准确地计数,算出反馈转速;CCP2模块能及时地比较Tf值输出触发脉冲,在中小型直流电机调速系统应用中,具有结构简单,运行可靠,调节范围宽,电流连续性好,响应快等特点。
责任编辑;zl
关于控制,MCU就介绍完了,您有什么想法可以联系小编。









