
3 系统各部分电路设计
3.1 主电路设计
主电路中各元件参数如图1所示:
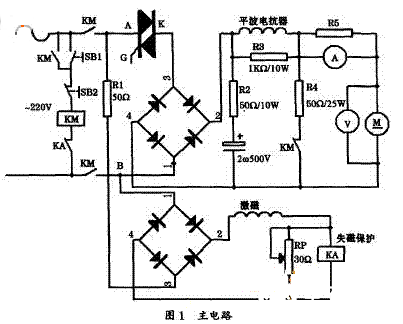
按一下启动按钮SB1,接触器KM线圈通电,KM常开触点闭合,常闭触点打开,启动按钮自锁,主电路导通。晶闸管调速电路通过改变双向晶闸管控制角大小来控制交流电输出,再经桥式整流,滤波后,得到直流,同时,电机通过激磁电路整流后,获得励磁,开始工作。
按一下停止按钮SB2,接触器KM线圈断电,KM常开触点打开,常闭触点闭合,自锁解除,主电路断电,电机停止工作。
为了限制直流电流脉动,电路中接入平波电抗器,电阻 在主电路突然断电时,为平波电抗器提供放电回路。
为了加快制动与停车,本装置中采用能耗制动,由电阻R4与主电路接触器常闭触点组成制动环节。电动机激磁由单独整流电路供电,为了防止电动机失磁而引起飞车事故,在激磁电路中,串接欠电流继电器KA。动作电流可通过电位器RP进行调整。
3.2 晶闸管触发电路设计
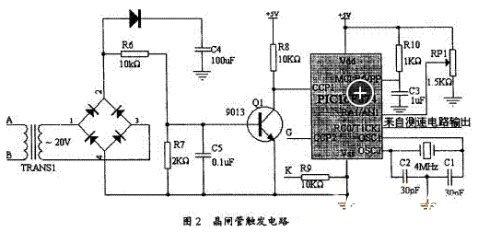
晶闸管触发电路及参数具体如图2所示,来自主电路中A、B两点电压经变压器变压为-20 V,再经过桥式整流后,在2点产生100 Hz左右的半波信号,通过R6,R7分压后接入NPN三极管进行放大,在三极管集电极产生过零脉冲,利用CCP1模块先捕捉过零脉冲上升沿,记下其发生时间,紧接着捕捉过零脉冲下降沿,两者的时间差即为过零脉冲宽度,其值的一半即为脉冲中点,采用这样的捕捉方式可以精确地得到交流电的实际过零点,同时利用ADC模傲转换模块转换PIC16F874引脚RA1/AN1模拟电压的值作为晶闸管控制角的设定值(电机速度设定值),改变电位器RP1设定值,相应改变晶闸管控制角大小,同时测速电路输出值由PIC16F874引脚RC0/T1CKI输入,经过TMR1计数器计数,算出转速,作为速度反馈值。本系统中单片机的振荡频率采用4 MHz,由PIC16F874单片机指令周期的特点可知,晶闸管控制角的分辨率是单片机振荡频率的四分之一的倒数,即1us,对于工频电的半波时间10 ms来说,控制角可达10000步,完全能够实现电机的无级平滑控制。
3.3 测速电路设计









