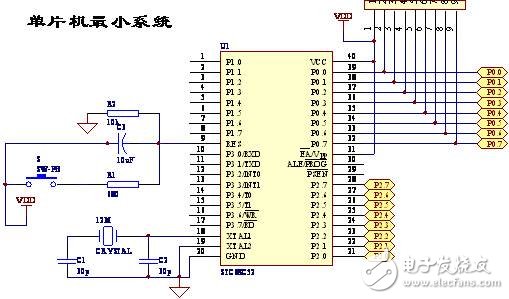
图五:单片机最小系统
2.2、电源模块
首先单片机用到的是5V的数字电,而电机驱动要用到L298的芯片,这种芯片用到12V的模拟电压,驱动舵机用到的又是5V的模拟电压。这就用到了三种电压。我手上有一块12V的电池,能够供给L298作为电机驱动的电源。然后我选择L7805来得到5V的模拟电压。最后供给单片机的也是此电压,然后把数字地和模拟地共地,从而得到了整个智能小车的总体供电系统。但是由于数字电和模拟电共在一起,干扰很大,系统的效果并不是很好。电路图如图六:
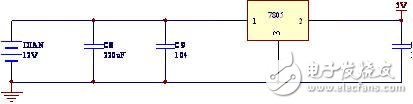
图六:电源模块电路图
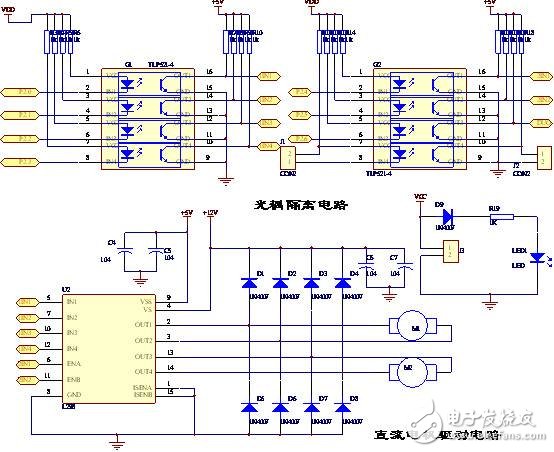
2.3、直流电机驱动模块
电机驱动我们选择芯片L298,当然在单片机和L298之间我们加了光耦,用来隔离数字电路和模拟电路。设计采用的光耦是TLP521-4,它主要由发光二极管和光敏三极组成。其工作原理如下:当光耦的输入端(如IN1)接收到高电压时,发光二极管没有导通不发光,光敏三极管呈高阻态(可以认为其为断路),此时输出端(如OUT1)输出高电压;当光耦的输入端接收到低电压时,发光二极管导通发光,光敏三极管导通呈低阻态(可以认为其短路),此时输出端输出低电压。由此可以看出通过光耦可以顺利地将数字电路的逻辑电压信号转换到模拟电路中。而L298是双H高电压大电流功率集成电路。直接采用11L逻辑电平控制。可以驱动继电器、直流电动机、步迸电动机等电感性负载。在此电路中L298连接保护电路根据单片机提供的逻辑电压对电机进行驱动。具体驱动方式如下:当使能端为高电平时。输人端1N1(IN3)为高电平信号,IN2(IN4)为低电平信号时,电机正转;输人端INl(IN3)为低电平信号,IN2(IN4)为高电平信号时,电机反转;INl(IN3)与IN2(IN4)相同时,电机快速停止。当使能端为低电平时。电动机停止转动。电机驱动采用的是PWM(脉宽调制)的方式。这是单片机上常用的模拟量输出方法,通过外接转换电路,可以将占空比不同的脉冲转换成不同的电压,以驱动直流电机转动从而得到不同的转速。PWM波的占空比越大,电机转动速度越快,当占空比达到100%时,速度达到最大。电路图如图七所示。