
今天小编要和大家分享的是接口,总线,驱动相关信息,接下来我将从步进电机原理与驱动方式深度解析,led驱动hhld-0300018这几个方面来介绍。

接口,总线,驱动相关技术文章步进电机原理与驱动方式深度解析
步进电机是将脉冲信号转换成机械运动的一种特殊电机。步进电机在使用时不需要额外的反馈,这是因为除非失步,否则步进电机每次转动时的角度已知的,由于它的角度位置已知就能精确控制电机运动的位置。一般我们会用 Arduino 驱动的小型步进电机有以下两种。
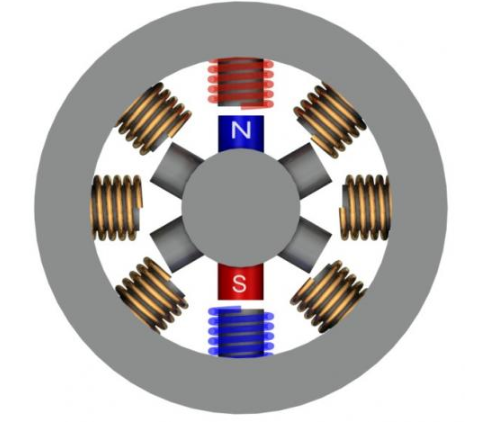
步进电机内部实际上产生了一个可以旋转的磁场,如图所示,当旋转磁场依次切换时,转子(rotor)就会随之转动相应的角度。当磁场旋转过快或者转子上所带负载的转动惯量太大时,转子无法跟上步伐,就会造成失步。
从步进电机的矩频特性图上可知,步进电机以越快的速度运行,所能输出的转矩越小,否则将会造成失步。每种不同规格的步进电机都有类似的矩频特性曲线,详细图表需要查阅其规格书。
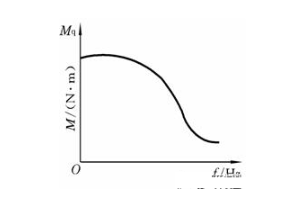
矩频特性
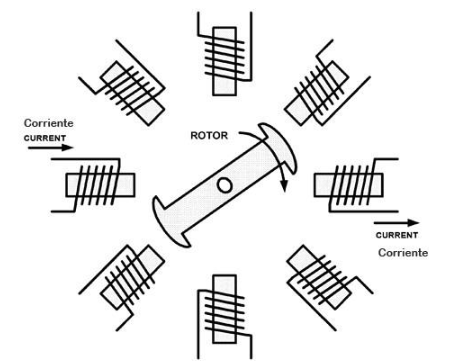
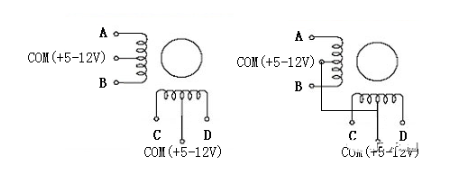
步进电机的磁极数量规格和接线规格很多,为简化问题,我们这里就先只以四相步进电机为例进行讨论。所谓四相,就是说电机内部有 4 对磁极,此外还有一个公共端(COM)接电源, ABCD 是四线的接头。而四相电机的可以向外引出六条接线(两条 COM 共同接入 Vcc),即 GND 和 ABCD,也可以引出五条线,如图所示,所以有成为六线四相制和五线四相制。
一相励磁方式









