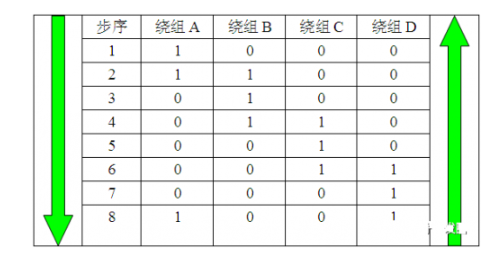
下表中 1 表示高电平、0 表示低电平,我们以下述最简单的一相励磁方式来驱动步进电机。

这种方式,电机在每个瞬间只有一个线圈导通,消耗电力小但在切换瞬间没有任何的电磁作用转子上,容易造成振动,也容易因为惯性而失步。
二相励磁方式
这种方式输出的转矩较大且振动较少,切换过程中至少有一个线圈通电作用于转子,使得输出的转矩较大,振动较小,也比一相励磁较为平稳,不易失步。

步进角是步进电机每前进一个步序所转过的角度。在不超载也不失步的情况下,给电机加上一个脉冲信号,它就转过一个步距角。这一简单的线性关系,使得步进电机速度和位置的控制变得十分简单。
一二相励磁方式
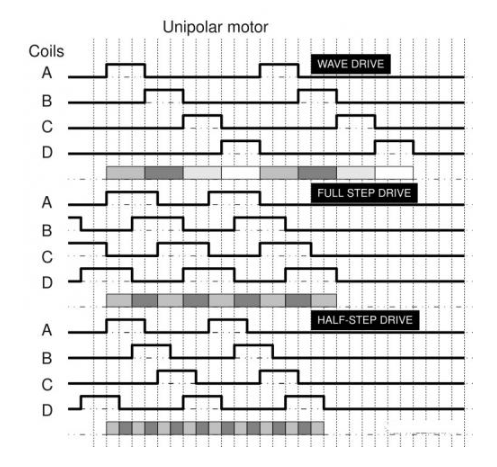
综合上述两种驱动信号,下面提出一相励磁和二相励磁交替进行的方式,没传送一个励磁信号,步进电机前进半个步距角。其特点是分辨率高,运转更加平滑。
下面是这三种驱动方式的时序波形图
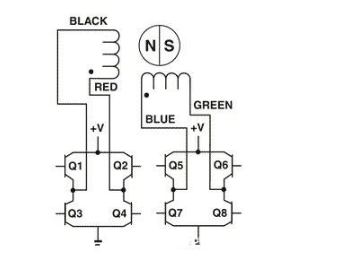
驱动问题
因为数字 I/O 口电流较小。因此,我们想到了使用晶体管进行放大。常用的方法有三种:
1. 直接利用晶体管来驱动,这需要你对电机和晶体管的详细参数有一定了解,才能选择恰当的参数去匹配他们。此外,还必须使用二极管来处理当电机内部线圈产生感应电动势逆向流入晶体管而对晶体管造成损害。
2. 使用诸如 ULN2003 和 ULN2803 这样的激励器,它实际是内部集成好了放大功能的集成电路芯片,此外也无需额外添加二极管,因为它已经内置了。
3. 使用光耦,在驱动芯片或者晶体管的前端再加入光耦合器,以加强隔离步进电机的反电动势,以免损害单片机。