
4. 使用 L293D 这样的 H 桥的方式来驱动步进电机,详细请参考上两节介绍的 L293 Motor Sheild 官网的说明。

我们以 ULN2003 为例,现有的驱动板可以用来驱动步进电机,我们只需要选择单片机的四个输出端口用杜邦线分别连接驱动板的 IN1、IN2、IN3、IN4,再用外置电源连接驱动板的 5-12V+接口,并把电源和单片机的地(GND)与驱动板的(–)共线即可。
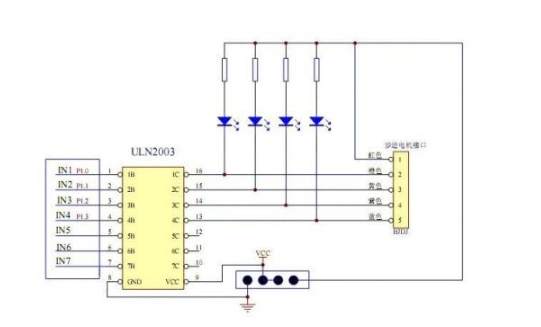
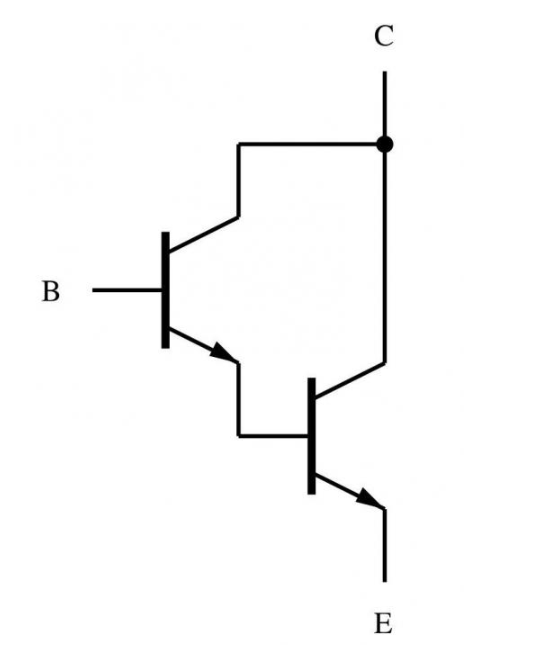
ULN2003 采用的是达林顿管(Darlington transistor)方式来增强对大电流负载(如步进电机)的驱动,所谓达林顿管其实就是二级放大的三极管而已(如右图所示),经过恰当的三极管型号选择匹配后,两次放大的三极管驱动能力比一个三极管更强。详情请参考 ULN2003 的 DataSheet。但无论哪种方式,记住,使用额外的外接电源来驱动晶体管和集成芯片,它才是电机的真正的能量提供者。
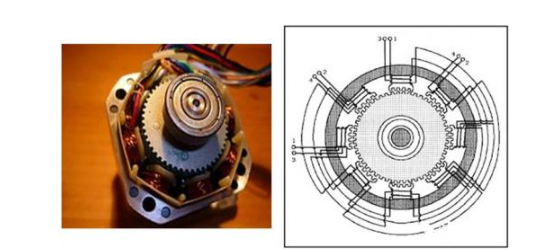
关于实际的步距角
前面所讲述的其实是一个简化模型,真正的步进电机步距角比较小。因为采用了图所示的多齿结构,这种结构类似于游标卡尺的工作原理,所以实际 4 相步进电机的步距角并非 360°/8 = 45°。根据其规格书,本节范例所用的步进电机的步距角是 5.625°,如果采用一–二相励磁方式,则可以达到其一半的分辨率。
关于接口,总线,驱动就介绍完了,您有什么想法可以联系小编。









