
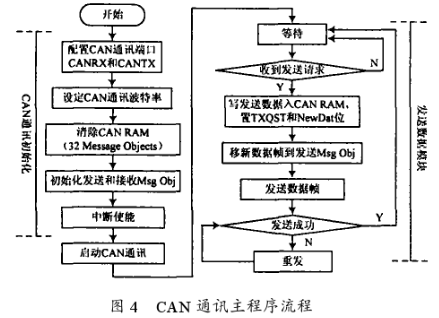
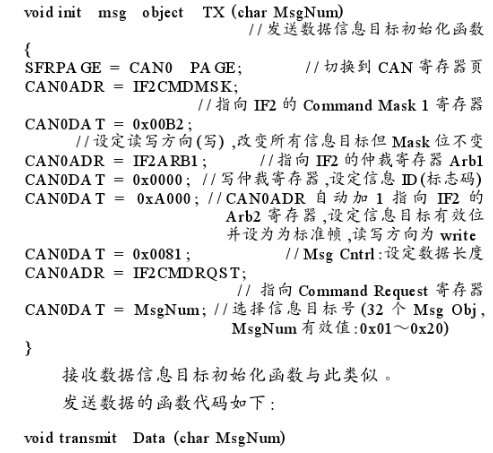
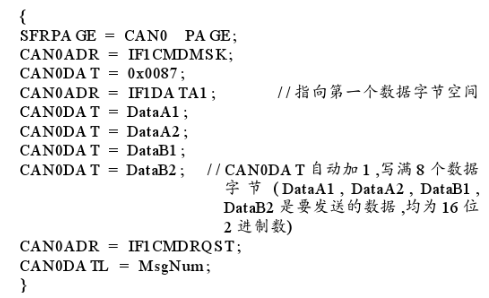
CAN通讯软件设计主要包括3个模块:CAN通讯初始化、接收数据和发送数据模块。信息目标的初始化程序代码(C语言)如下:
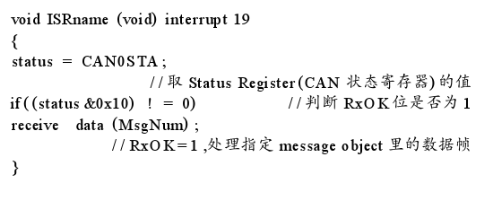
当微处理器接收数据采用中断方式,接收Message Object初始化时将RxIE位置1。当程序进入到CAN中断服务子程序时,先判断CAN状态寄存器的RxOK位是否已置位,若已置位,则说明CAN控制器已经成功接收到一个数据帧(因为CAN通讯有多个中断源,而中断向量只有一个),这时再调用相应的函数,取出数据帧中有用的字节进行处理或执行相应的操作。源程序代码如下:
5 、结语
C8051F040是完全集成的混合信号系统级单片机,具有与8051指令集完全兼容的CIP-51内核,代表了8位单片机的发展方向。他不但集成了构成监控系统的常用外设,而且还集成了高可靠性、高性能的CAN总线控制模块。本文使用该芯片设计的CAN节点模块集成度高、性能稳定,实时性好、软件设计简洁,在工业生产和仪器开发领域具有广泛的应用前景。本文给出的硬件和软件设计方案均已通过实际测试,并成功运用于大洋协会“十五”攻关项目:小型底栖生物标本自动分离系统的通讯模式中。
责任编辑:gt
关于接口,总线,驱动就介绍完了,您有什么想法可以联系小编。









