
二、宝莱车驱动系统CAN总线
宝莱汽车上典型的与驱动系统有关的控制单元有电控燃油喷射系统、自动变速器系统、防抱死制动系统(ABS)、安全气囊系统等。
由于每个控制单元对实时性的要求是因数据的更新速率和控制周期不同而不同的,为了满足各子系统的实时性要求,与对公共数据实行共享,如发动机转速、车轮转速、油门踏板位置等,如宝莱车的4缸汽油机运行在4000r/min,则电控单元控制两次喷射的时间间隔为6ms,其中喷射持续时间为30度的曲轴转角(1ms),在剩余的5ms内须完成转速测量、油量测量、A/D转换、工况计算、执行器的控制等一系列过程。这就意味着数据发送与接收必须在1ms内完成,才能达到汽油机电控的实时性要求。这就要求其数据交换网是基于优先权竞争的模式,且本身具有极高的通信速率,宝莱车采用了CAN总线正是为满足这些要求而设计的。
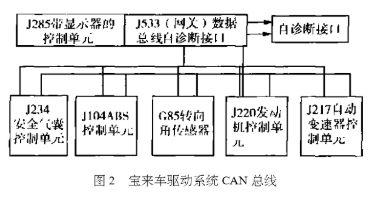
宝莱汽车驱动系统CAN的主要连接对象如图2所示。显然,将以上控制器归并到一根总线上是非常合理的。因为它们所具备的基本特征是一致的,所控制的对象是与汽车的行驶直接有关的系统,它们之间存在着较多的信息交流,而且很多都是连续的和高速的。这样可提高发动机的动力性、经济性和排放性能。
二、宝莱车驱动系统CAN总线
宝莱汽车上典型的与驱动系统有关的控制单元有电控燃油喷射系统、自动变速器系统、防抱死制动系统(ABS)、安全气囊系统等。
由于每个控制单元对实时性的要求是因数据的更新速率和控制周期不同而不同的,为了满足各子系统的实时性要求,与对公共数据实行共享,如发动机转速、车轮转速、油门踏板位置等,如宝莱车的4缸汽油机运行在4000r/min,则电控单元控制两次喷射的时间间隔为6ms,其中喷射持续时间为30度的曲轴转角(1ms),在剩余的5ms内须完成转速测量、油量测量、A/D转换、工况计算、执行器的控制等一系列过程。这就意味着数据发送与接收必须在1ms内完成,才能达到汽油机电控的实时性要求。这就要求其数据交换网是基于优先权竞争的模式,且本身具有极高的通信速率,宝莱车采用了CAN总线正是为满足这些要求而设计的。
宝莱汽车驱动系统CAN的主要连接对象如图2所示。显然,将以上控制器归并到一根总线上是非常合理的。因为它们所具备的基本特征是一致的,所控制的对象是与汽车的行驶直接有关的系统,它们之间存在着较多的信息交流,而且很多都是连续的和高速的。这样可提高发动机的动力性、经济性和排放性能。









