
B=ω/θ (1)
式中:B为莫尔条纹间距;ω为光栅常数。
由条纹移动数目N来计算光栅移动距离:
S=Nω (2)
假设光栅环的半径为r,则轴旋转的角度为:
β=s/r=NBθ/r (3)
这样就可通过计算输出脉冲通过算出转动角度。
该系统采用雷尼绍20μm圆光栅和与之配套的RGH20X系列读数头进行设计。为了提高精度,读数头内部对光栅5细分(分辨率为4μm),输出的两条正交方波脉冲又对光栅进行4倍细分。RESR圆光栅刻线直接刻在圆环的外表上(栅距20μm),RGH20系列读数头具有雷尼绍的独一无二的光学滤波系统设计,可在有污染、划痕、指纹情况下读数,所有误差都可通过简单的精确调整获得补偿。
2.2 DSP及外围电路
该测量系统的硬件设计是以TMS320X2812型DSP为控制核心的。TMS320X2812为32位定点DSP,其最高的主频为150MHz,最小指令周期为6.67 ns,外部采用低频时钟,通过片内锁相环倍频。TMS320X2812内部事件管理器(EV)模块的QEP单元可直接对正交脉冲信号译码,可方便、精确地对圆光栅输出信号进行数据采集。TMS320X2812的串行通信接口(SCI)是一个双线通信异步串行通信接口,为减少串口通信时CPU的开销,其串口支持16级接收和发送FIFO。该接收器和发送器都是双级缓冲器,具有各自独立的控制位与中断位,SCI采用硬件检查通信数据极性和数据格式,可减少软件负担。
2.2.1 基于DSP的数据采集
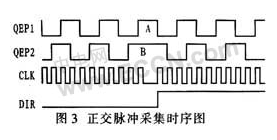
圆光栅读数头输出信号为两列频率变化且正交(即相位相差90°)的脉冲(A,B)如图3所示。将两列正交脉冲信号输入到TMS320X2812的QEP1和QEP2计数引脚,EV模块中QEP电路方向检测逻辑可根据A,B脉冲的相位关系产生一个方向信号作为通用定时器的方向输入。如果QEP1超前,定时器递增计数,反之定时器递减计数。QEP电路对两列正交输入脉冲的上升沿和下降沿计数,因此产生的时钟频率是每个输入序列的4倍,并把该时钟作为通用定位器2的输入时钟,这样可通过QEP对输入的光栅信号4细分。通用定时器2总是从当前值开始计数,因此可在使能QEP前将所需值装载到所选通用定时器的计数器中,定时器数值除以4得出读数头输出的脉冲数,从而计算角度。QEP电路对输人脉冲进行4细分,可使精度提高四倍,线位移精确到1μm。
2.2.2 接口电路设计
RGH20读数头输出信号经光电隔离后直接送到QEP单元引脚。其中,光电耦合器件采用TLP550型高速光耦,用以实现电源与地的隔离。串行通信接口电路采用符合RS-232标准的驱动器件MAX232进行通信。由于MAX232的电源电压为+5V,而DSP的电源电压为3.3 V,故需在MAX232与TMS320X2812间加电平转换器件74LVC04。如图4所示。









