
3 系统软件设计
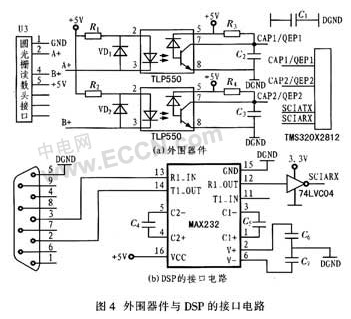
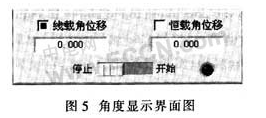
上位机编程采用虚拟仪器软件开发平台LabWindows/CVI,串行通信是虚拟仪器系统中连接硬件与上位机的最易实现和最经济的方式,LabWindows/CVI提供有实现串行通信的专门函数库。该系统是采用SCI接口与RS232串口实现DSP与PC机之间的数据通信,上位机可跟踪显示轴的角度变化。图5给出角度显示界面。
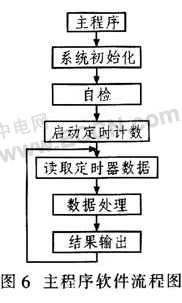
该系统的下位机软件设计运用C语言编程,采用模块化设计,更有利于功能扩展及应变。图6给出其主程序软件流程。其中,初始化子程序主要包括了系统时钟初始化、端口初始化、中断设置等;自检子程序用于实现系统的初始校正和定时器初始化;数据处理子程序中,用DSP对通用定时器2的计数器值进行分析、计算和修正,以得到相应的角位移值;结果输出子程序用于实现角位移值的显示,其关键是浮点数值的转换,该子程序可通过串口将角位移数据传输到上位机显示和存储。
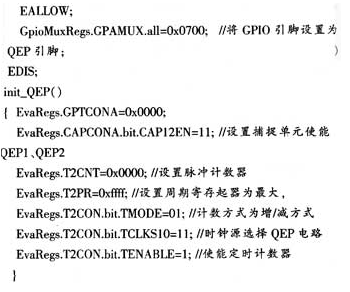
以下给出QEP电路的初始化编程代码:
4 结语
该系统设计采用了雷尼绍圆光栅,不仅实现了角位移的非接触高精度测量,而且还具有安装简单,调试方便,测量精度高,抗干扰能力强等优点。该测量系统采用DSP的QEP单元对圆光栅读数头输出信号进行4细分计数,进一步提高了测试精度,其线位移达1μm。TMS320X2812型DSP在系统中实现测量数据的采集、处理、显示及与上位计算机通信,并根据测量结果自动控制被测旋转体的角位移,因此该测量系统具有智能化特点,现已用于某军品测试系统,相信在测试、工业和军事等领域中更具广泛的应用前景。
责任编辑:gt
关于处理器,DSP就介绍完了,您有什么想法可以联系小编。









