
推算最简单的形式是通过测量用户在一系列方向上行驶了多远来跟踪用户的位置。如果IMU可以提供相对于北方的相对准确的方向(磁罗盘),然后测量用户已经走了多远(步进计数),则可以构建一个相当准确的位置。生产精确,可靠的MEMS航位推算系统存在许多挑战,但至少该应用不会突破传感器本身的性能极限。
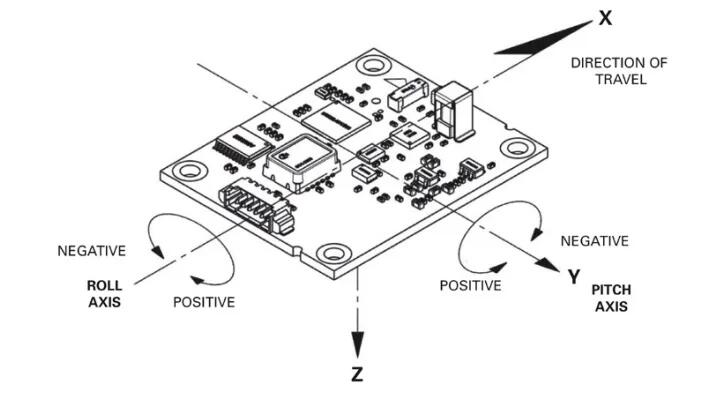
MEMS陀螺仪是一种由硅微加工而成的光盘,被激发后以明显高于要测量的运动带宽的速率振动。当光盘沿一个轴振动时,如果沿其敏感轴旋转,则会产生科里奥利力,该力将振动力发送到正交轴上,该正交轴被测量并与旋转的角速度成比例。但是,与该旋转速率相对应的信号幅度很小,它不是位移的直接测量值,而是随时间变化的位移率,然后需要将其积分到角位移中。但是,它只需要一次积分,而不需要使用加速度计确定线性位移所需的二次积分。
陀螺仪仅用于测量相对于任意起点的相对旋转。它不受线性加速度的影响(或几乎不受线性加速度的影响),因此无论冲击和振动如何,它都有助于提供非常精确的旋转测量。由于其测量特性,它可提供准确的角位移,且延迟和超调量极低。
从A点到B点
IMU可以准确确定行进方向,从而跟踪士兵离开A点后的路径。需要里程表功能来测量他们向B点前进时在任何给定方向上行进了多远。汽车的里程表相对简单。有一个传感器,它计算汽车车轮的部分和完全旋转的次数,并将其乘以车轮的周长得出一个相当准确的行驶距离。现代里程表的精确度可达到汽车实际行驶距离的0.1%之内。对人来说,类似的功能只是计步器或计步器。在过去的五年中,由于活动设备,智能手表和手机的使用,计步器得到了极大的改善。
这种方法的复杂性在于确定步行,慢跑,跑步甚至爬行的不同步幅。有几种可用的方法可以很好地确定步幅长度-例如,在有GPS覆盖范围的情况下对开放天空中的步数进行计数,然后将行进距离除以两个端点之间采取的步数。无论如何,这是一个可解决的问题,仅取决于特定用例的可接受程序。
在战斗中导航
现在,最新一代的MEMS陀螺仪可以很好地跟踪士兵的动态运动长达30分钟,而不会出现明显的偏差或比例误差。我们开发的系统目前还无法与它们配合的唯一方法是使用陀螺罗盘技术将其锁定在North上,因为它们的1/f噪声仍然约高50倍。MEMS非常适合在短时间内跟踪高动态运动,例如与Wii控制器一起玩。但是对于需要低噪声和高灵敏度的应用,例如测量地球每小时15°的自转速度(这是一个很小的信号),还远远不够。









