
脉冲方法
在脉冲方法中,光源发出一系列N 个激光短脉冲,这些脉冲被反射回带有电子快门的传感器,该传感器能够在一系列短时间窗口中进行曝光。图5中的三个快门窗口或脉冲被用于捕获反射 光脉冲。其中BG窗口捕获环境光,计算深度时环境光强度会被减掉。
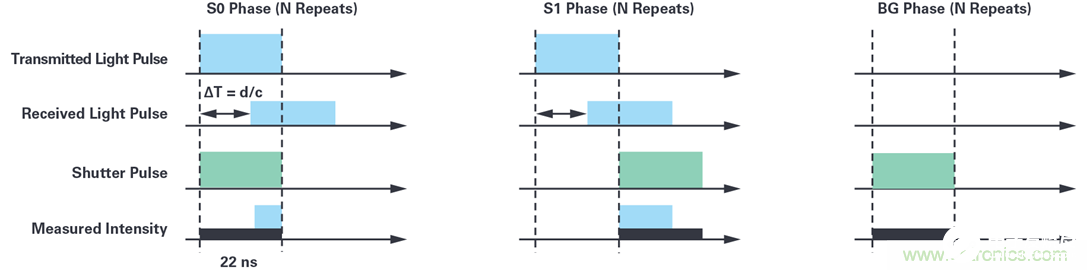
图5. 快门窗口捕捉反射光的示意图。
根据不同快门曝光测得的光强值,可以按照以下公式估算得出ToF ∆T:

在公式1中,使用公式9中的表达式替代∆T,得出公式10,由此计算距离:

需要注意的是,这些公式是建立在假设脉冲是完美的矩形脉冲的基础上的,考虑到硬件的局限性,这是不可能实现的。此外,在实际情况下,需要对几百甚至几千个激光脉冲进行积分,才能获得测量所需的足够的信噪比(SNR)。
连续波和脉冲ToF技术系统的优缺点
相对于应用用例,两种ToF方法都有各自的优缺点。需要考虑的问题包括:测量距离、使用系统的环境、精度要求、热/功耗限制、外形大小以及电源问题。值得注意的是,目前已在市场上得到广泛应用的绝大多数连续波ToF系统都使用CMOS传感器,脉冲ToF系统则使用非CMOS传感器(主要是CCD)。因此,以下列出的优点/缺点都是基于这些假设:
连续波系统的优点
● 对于对精度要求不高的应用,连续波系统可能比脉冲系统更容易实现,因为它不要求激光脉冲非常短,也不需要具有超快的上升/下降沿,当然在实际中很难复制完美的正弦波。但是,如果精度要求变得更严格,那么将需要更高频率的调制信号,这实际上很难实现。
● 由于激光信号具有周期性,所以连续波系统测量中的任何相位测量每隔2π会重复一次,意味着会产生一个混叠距离。对于只有一个调制频率的系统,混叠距离也是最大可测距离。为了应对这个限制,可以使用多个调制频率来执行相位展开,其中,如果两个(或多个)具有不同调制频率的相位测量值与估算的距离一致,就可以确定与物体之间的真实距离。这种多重调制频率方案也可以用于减少多路径误差,多路径误差是由于一个物体的反射光击中另一个物体(或在镜头内部反射),然后返回到传感器时会导致的测量误差。
● 在所有CMOS成像器系统中,可以使用标准电源轨(+5 V、+3.3 V、+1.2 V),而CCD可能需要使用更高的负极(–9 V)和正极(+14 V)电源轨道。









