
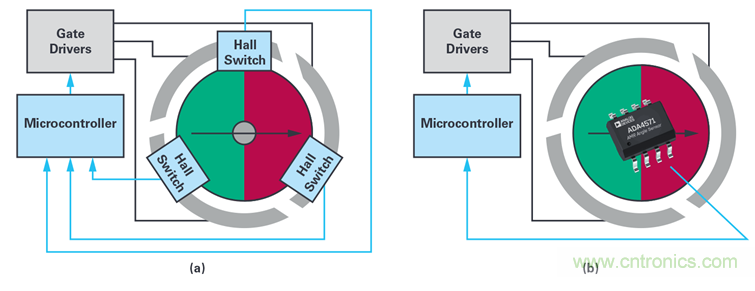
图1. (a) BLDC阻塞换相控制和(b) BLDC正弦换相控制。
安全关键应用的功能安全(示例EPS)
ISO 26262于2011年引入,作为一种安全标准,用于解决与电气安全相关的系统故障可能造成的危害,之后被2018年版取代。
必须对系统实施安全和风险分析,以确定系统的ASIL等级。ASIL等级是通过审查系统在运行期间潜在危险的严重程度、暴露程度和可控性来确定的(见图2)。
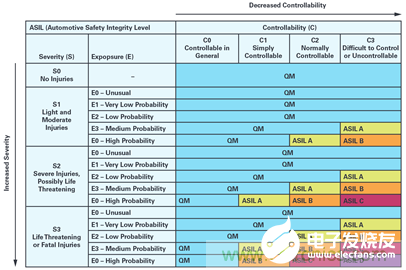
图2. ISO 26262 ASIL评级矩阵。
例如,如果我们对EPS系统实施风险和危害分析,可能会得出以下结论:基于这些事件(例如转向卡滞和自动转向等)的严重程度、可控性和暴露性,将这些严重事件评定为ASIL D等级。同样,对于即将推出的电子制动系统,可以采用同样的逻辑确定不可控事件的严重程度,如制动卡滞或自动制动。
根据EPS或制动系统示例,ASIL D系统的评级可以通过分解子系统来实现,如图3a、图3b和图3c所示。

图3. 针对ASIL D系统的ASIL分解方案。
并不要求每个系统组件都按照ASIL D标准和流程进行开发,以使ASIL D系统合规;但是,在进行系统级别的审核时,要求整个系统必须满足要求,并且可以集成QM、ASIL A、B、C、D级别的子组件作为系统的组成部分。
系统分解还应该确保充分的独立性,并考虑到依赖或共因故障的可能性。
EPS系统拓扑
典型的EPS系统拓扑结构如图4所示。EPS ECU根据驾驶员施加到方向盘上的转向扭矩、方向盘的位置和车辆的速度来计算所需的辅助功率。EPS电机通过施加力来转动方向盘,减少驾驶员操纵方向盘所需的扭矩。
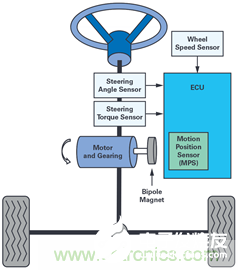
图4. 典型的EPS拓扑。
电机轴位置(MSP)角结合相电流测量信息,用于对EPS电机驱动器实施换相和控制。基本的典型EPS电机控制环路如图5所示。所需的扭矩辅助等级因驾驶条件而异,由车轮速度传感器和扭矩传感器决定,扭矩传感器测量驾驶员或无人驾驶汽车中的电机执行器施加到方向盘上的扭矩。然后,微控制器使用MSP数 据和相电流数据来控制提供给电机(提供所需的辅助)的电流负载。









