
由式(2-2)可知,极板间电容C与极板间距离 是成反比的双曲线关系。由于这种传感器特性的非线性,所以工作时,一般动极片不能在整个间隙,范围内变化,而是限制在一个较小的 范围内,以使 与 C的关系近似于线性。
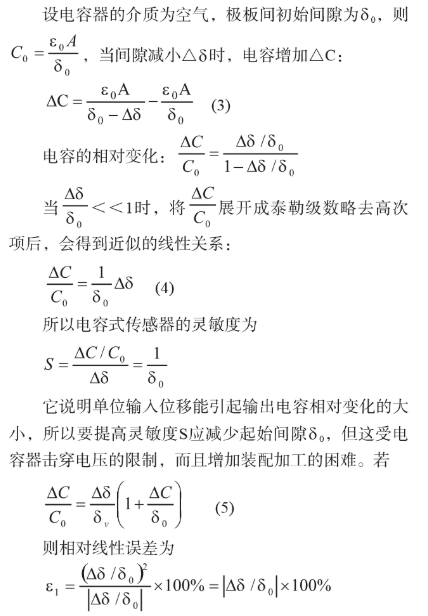
它说明单位输入位移能引起输出电容相对变化的大小,所以要提高灵敏度S应减少起始间隙 ,但这受电容器击穿电压的限制,而且增加装配加工的困难。
由式(2-5)可以看出,非线性将随相对位移增加面增加。因此,为了保证一定的线性,应限制极板的相对位移量,若增大起始间隙,又影响传感器的灵敏度,因此在实际应用中,为了提高灵敏度,减小非线性,大都采用差动式结构,在差动式电容传感器中,其中一个电容器C1的电容随位移 增加时,另一个电容器C2的电容则减少,它们的特性方程分别为:
可见,电容式传感器做成差动式之后,非线性大大降低了,灵敏度提高一倍,与此同时,差动电容传感器还能减小静电引力测量带来的影响,并有效地改善由于温度等环境影响所造成的误差。
3、电容式差容式力平衡传感器器的工作原理与结构
3.1工作原理
如图1所示,差容式力平衡加速度传感器原理框图
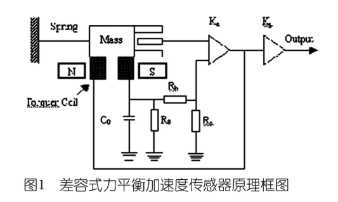
电路中除了所必须的电容,电阻外,主要由正负电压调节器,四运放放大器LT1058,双运放op270放大器组成。
3.2差容式力平衡传感器机械结构原理
由于差动式电容,在变间隙应用中的灵敏度和线性度得到很大改善,所以得到广泛应用。如图2所示为一种差容式力平衡电容差容式力平衡传感器原理简图。主要由上、下磁钢,电磁铁,磁感应线圈,弹簧片,作电容中间极的质量块,覆铜的上下极板等部分组成。传感器上、下磁钢通过螺钉及弹簧相连,作为传感器的固定部分,上,下极板分别固定在上、下磁钢上。极板之间有一个用弹簧片支撑的质量块,并在此质量块上、下两侧面沉积有金属(铜)电极,形成电容的活动极板。这样,上顶板与质量块的上侧面形成电容C1,下底板与质量块下侧面形成电容C2,弹簧片一端与磁钢相连,另一端与电容中间极相连,以控制其在一个有效的范围内振动。由相应芯片输出的方波信号,经过零比较后输出方波,此方波经电容滤除其中的直流电压,形成对称的方波,该对称的方波加到电容的一个极板上,同时经一次反向后的对称波形加到另一个极板上。









