
今天小编要和大家分享的是电子制作相关信息,接下来我将从智能寻迹小车的设计方案,循迹小车的组装说明(压缩)ppt这几个方面来介绍。

电子制作相关技术文章智能寻迹小车的设计方案
本车除一般非编程寻迹车具有的寻迹功能外,还增加了遇障停车、报警,转弯时转向灯提示功能。同时在电路原理上作了较大改变,是车寻迹灵敏度更高,实现较小的转弯半径。
设计方案
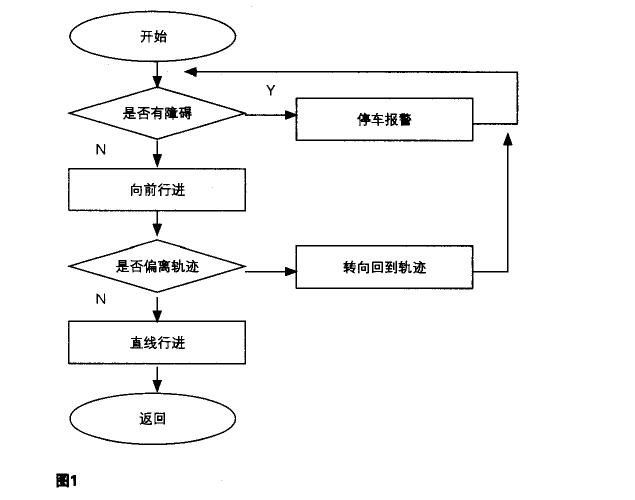
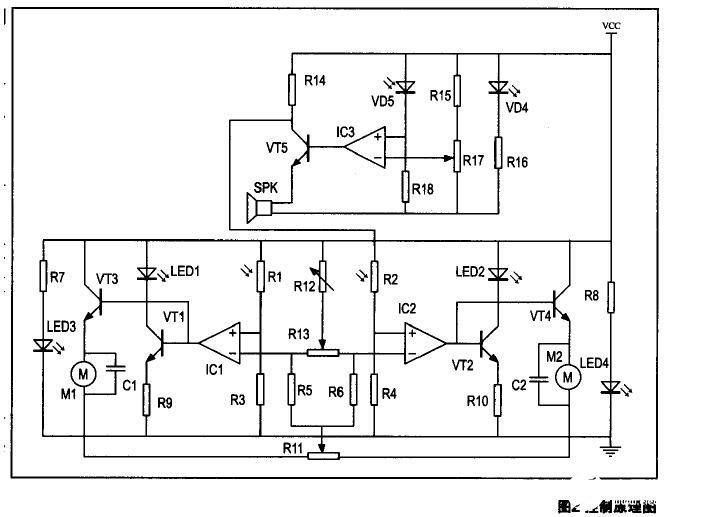
根据不同的颜色(黑、白)对光的反射强度不同,光敏电阻受不同强度光感应阻值不同的特性。分别将两电位器与两固定电阻分压后的电压作为电压比较器的基准电压,两光敏电阻与两固定电阻分压后电压作为电压比较器的比较电压,电压比较器的输出电流经三极管放大后分别控制两个电动机的转速。以达到转向的目的,从而实现智能车按既定轨道行走。通过红外传感器检测障碍实现避障报警功能(见图1)。电路原理图见图2。
控制原理
①如图2中电位器R12、R13、R17与R5、R6、R15组成分压电路为电压比较器提供基准电压,光敏电阻R1、R2、红外接收器VD5与电R3、R4、R18组成比较电压,发光二极管LED1、LED2与三极管T1、T2及电阻R9、R10组成转向灯。发光二极管LED3、LED4与R7、R8组成光敏电阻的补光灯,红外发射二极管VD6及电阻R16组成红外发射源。R14、三极管VT5及蜂鸣器组成报警装置。三极管VT3、VT4与电动机及电容组成动力部分。
②当前方无障碍时。红外接收器不能接收到红外线呈高阻态,电压比较器IC3输出低电平,三极管VT5不导通。光敏电阻输入电压较高,电压比较器ICl、IC2正常工作,蜂呜器不响。当前方有障碍时,红外接收器接收到红外线呈低阻态,电压比较器IC3输出高电平,三极管VT5导通,光敏电阻输入电压被拉低,电压比较器lC1、IC2通向输入端收入电压较低,三极管VT3、VT4不导通,故小车不前进同时蜂鸣器报警。
③正常行走时两光敏电阻R1、R2都在强光区,阻值较小,电压比较器IC1、IC2输出高电平,两个电动机都转动,小车直线前进,两个转向灯都不发光。当小车
偏向轨道右侧时,左边的光敏电阻R1转向弱光区,其阻值变大,相应电压比较器IC1输出低电平,左边电动机M1停止转动,小车向左转弯,同时左边转向灯LED1发光。当小车偏向轨道左侧时,右边的光敏电阻R2转向弱光区,其阻值变大,相应电压比较器IC2输出低电平,右边电动机M2停止转动,小车向右转弯,同时右边转向灯LED2发光。









