为了评估步进电机的特性,必须要有必要的测量方法,从本节开始首先讲解下步进电机的静态转矩特性及步进角精度。
静态转矩特性

静态转矩特性为步进电机的转子静止状态(平衡状态)的特性,该特性与时间无关,静态转矩特性也称为角度-静态特性或刚度特性,是步进电机定子直流激磁状态下,负载转矩与转子位移角度的变化关系。此转矩如右图所示,以正弦规律变化,最大转矩为,产生的静态转矩T与位移角θ的关系如下:
其中,图中的θ、θL、θM为机械角度。θM为产生TM的角度。两相PM型或两相HB型的步距角一致。根据上式,以及《步进电机的基本特性:静态、动态、暂态转矩特性》一问中的式:θL=(2θM/π)arcsin(TL/TM)得知,负载转矩TL决定位移角θL的大小。
由于步进电机的负载决定角位置,因此一定负载转矩TL时,θL越小,角度精度越高。因此希望步进电机最大静态转矩(保持转矩)TM要大。连续测量TL与θL,就可以得到静态转矩特性曲线。
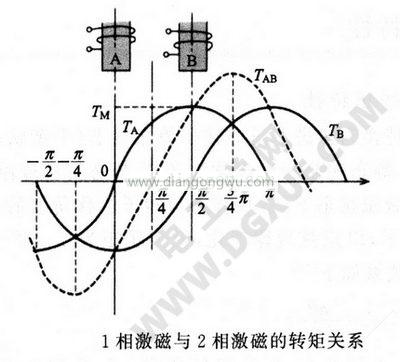
步进电机的静态转矩特性,可以1相激磁,也可以2相激磁,A相与B相1相激磁转矩公式如下式所示,其中角度θ为电气角。

2相激磁转矩:TAB上(式1)、(式2)推导为:
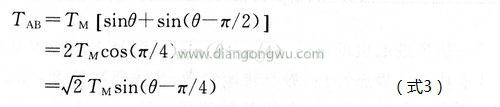
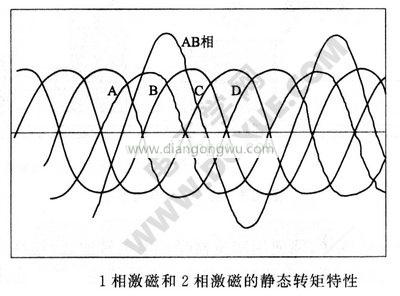
2相激磁的转矩为1相的√2倍(根号2),相位位移π/4,1相激磁转矩TA、TB与两相激磁的转矩TAB,如下图所示。
其次,说明这些转矩的测定方法。最近由专业生产测量设备的厂家生产的步进电机转矩测量装置在市场上有售,在此不对这些仪器的测试方法进行说明。
静态转矩特性的测量
转矩表:将步进电机固定。如图下图所示,读取转矩表的读数和角度测量仪的读数,依据角度及转矩绘制距角特性曲线,如图如本文前面第一图所示。如不测量角度,只能测出最大静态转矩TM。

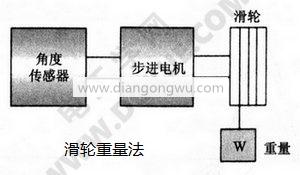
滑轮重量法:如图下图所示,用滑轮和重物代替上图的转矩表。依次改变重物W的重量,利用电位计或编码器测量角度,也能得到与转矩表相同的转矩曲线。
应力计和编码器:前述的两种方法转矩值需要人工读取,测量费时间,且无法自动得出转矩曲线。相对的,如图下图所示,应变计式转矩计与光学式两轴编码器直接与步进电机连接,利用转矩计、编码器和记录仪,能连续测量静态转矩特性。
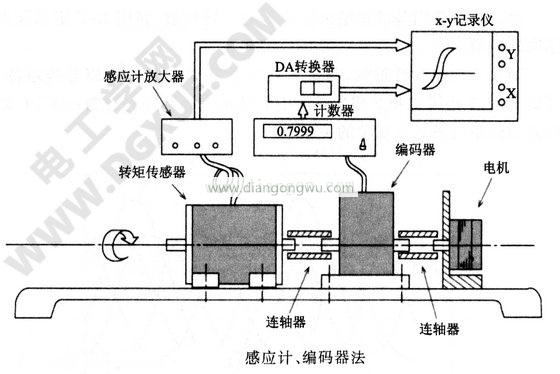
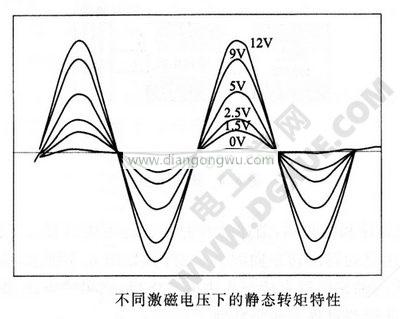
为了使电机旋转,须使用减速器降低电机转速,齿轮啮合引起的重量变化量很小,此时,须加上比转子惯量大十几倍的飞轮。在齿轮的负载方向要加上重量,以便使齿隙最小。下图的曲线为图上图的方法的试验曲线,调整被试电机的供电电压,测量静态转矩特性。被试电机的尺寸大小为42mm,33mm长,两相HB型,1.8°,35Ω/相,转子惯量15g•cm2。
测量时需要用基准重量来校正Y轴的转矩值,利用X-Y记录仪直接读取转矩值。
下图为改变激磁相,测量1相激磁和2相激磁的静态转矩特性。可以看出,1相激磁和2相激磁产生的转矩大小和停止位置的不同,即相位差和转矩与图本文第二图所示的关系相同。
定位(齿槽)转矩特性测量法
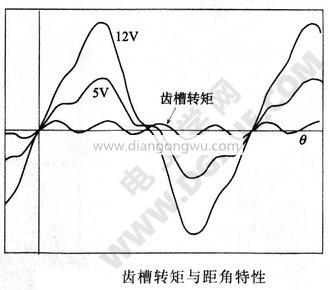
转子使用永久磁铁的步进电机,定子线圈没有通电流时,转子如旋转也会产生转矩。此时,永久磁铁产生的转矩称为齿槽转矩或定位转矩。此转矩用感应计和编码器方法测量,但齿槽转矩只有静态转矩的10%,所以要改变转矩计的测量范围。为得到准确的测量数据,步进电机、编码器、转矩传感器的同轴度要好,考虑使用可拆卸的连轴器,要注意不要产生摩擦转矩。
上两转矩特性图为被试步进电机的静态转矩特性,由于其齿槽转矩过小,静态转矩与齿槽转矩如同时表示,则齿槽转矩对θ、τ的影响很不明显。下图所示的步进电机静态转矩特性中绘出的齿槽转矩比实际齿槽转矩要大。实际上,被试步进电机规格选用两相HB型,3.6°步距角,4主极的步进电机,其齿槽转矩为静态转矩的4倍频率,额定电压为12V时的距角特性受到齿槽转矩的影响,发生畸变;当输入电压降低到5V时,由于齿槽转矩波形不变,静态转矩特性的畸变更厉害。因此,由12V到5V节能状态运行,依据负载情况,应注意控制位置误差。