
步进电机分辨率(一圈的步数,360°除以步距角)越高,位置精度越高。为了得到高分辨率,设计的极数要多。PM型转子为N与S极在转子的铁心外表面上交互等节距放置,转子极数为N极与S极数之和,为简化讲解,假设极对数为1。此处确定转子为永久磁铁的步进电机的步距角θs由下式表示,其中Nr为转子极对数,P为定子相数,(本课后面叙述的HB型步进电机Nr为转子齿数):
θs=180°/PNr
上式的物理含义如下:
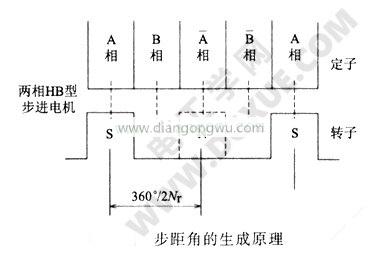
转子旋转一周的机械角度为360。,如用极数2Nr去除,相当于一个极所占的机械角度即180°/Nr。这就是说,一个极的机械角度用定子相数去分割就得到步距角,此概念如下图所示。
由式θs=180°/PNr可知,步距角越小,分辨率越高,因此要提高步进电机的分辨率,就要增加转子极对数或采用定子相数P较多的多相式方法。而Nr的增加受到机械加工的限制,所以要制造高分辨率的步进电机需要两种方法并用才行。








