
转子不采用永久磁铁的步进电机(VR型或反应式或变磁阻式)很早就在三相步进电机上得到应用。1986年日本伺服公司开发了转子为永久磁铁、定子磁极带有齿的步进电机(在后面会详细介绍磁极齿的设计原理),定、转子齿距的配合,可以得到更高的角分辨率和转矩。三相步进电机定子线圈的主极数为三的倍数,故三相步进电机的定子主极数为3、6、9、12 等。
转子不采用永久磁铁的步进电机(VR型或反应式或变磁阻式)很早就在三相步进电机上得到应用。1986年日本伺服公司开发了转子为永久磁铁、定子磁极带有齿的步进电机(在后面会详细介绍磁极齿的设计原理),定、转子齿距的配合,可以得到更高的角分辨率和转矩。三相步进电机定子线圈的主极数为三的倍数,故三相步进电机的定子主极数为3、6、9、12 等。
下图为不同相数的步进电机典型定子结构和驱动电路的比较,其中忽略了转子结构图。假设转子均为PM型或HB型,并且依据定子为两相、三相、五相等配备相应的转子。定子采用不产生不平衡电磁力(在后面会详细介绍,转子径向吸引力的和不能完全互相抵消,产生剩余径向力)的最小主极数结构,即两相为4个主极、三相为3个主极、五相为5个主极时,结构上会产生不平衡电磁力,除特殊用途外不会使用上述结构。图中,定子的结构为两相为8个主极、三相为6个主极、五相为10个主极,为最简单的结构。
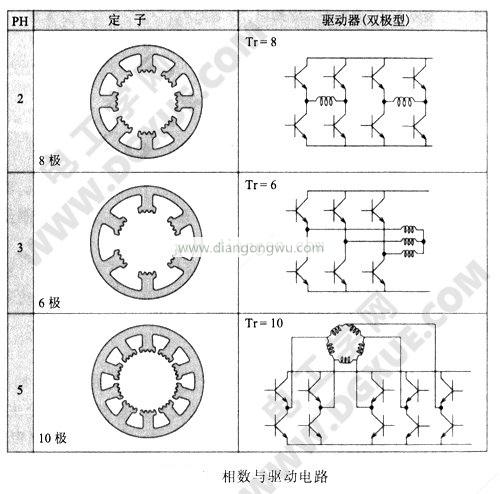
另一方面,如双极型(Bi-polar)线圈所使用的步进电机驱动电路,其功率管数,两相为8个、五相为10个,三相则由于绕组采用Y或△接法的关系,3个出线口的驱动只用6个功率管就够了,所以从电机和驱动器一体考虑,三相步进电机结构最简单,其两者的制造成本最低。
从定子相数的奇偶数来看,奇数情况下驱动电路中切换功率管的数量要比偶数情况下少,例如三相步进电机要比两相步进电机的驱动功率管数少。三相的驱动IC现在三权电气公司、三洋电机公司、新电元工业公司等生产企业已经有售。三相步进电机与两相步进电机比较,在相同的转子齿数时,具有提高1.5倍分辨率、振动低等优点,所以使用数量会增加,价格会降低,希望其能成为一款系列化步进电机,其性能将在后面详细介绍。
有关三相永磁式步进电机,除本课程外,以前还没有系统介绍的文献, 本课程将详细介绍三相HB型步进电机(42mm及60mm),其驱动器的外形如下图所示。









