
步进马达依定子线圈的相数不同可分成二相、四相及五相式,小型步进马达以二相式较为普遍。
单极性型(unipolar) :定子磁极极性为同一方向,如可变磁阻式步进马达,磁极线圈只有一组,所加的激磁电流为固定方向,因此单极性步进马达所需的电源较简单。单极性驱动电路使用四只晶体管来驱动步进电机的两组相位,电机结构则如图1所示包含两组带有中间抽头的线圈,整个电机共有六条线与外界连接-图1。这类电机有时又称为四相电机,但这种称呼容易令人区分不了又不正确,因为它其实只有两个相位,精确的说法应是双相位六线式步进电机。六线式步进电机虽又称为单极性步进电机,实际上却能同时使用单极性或双极性驱动电路。
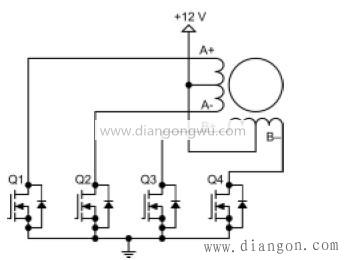
图1 单极性二相步进电机驱动电路
双极性型(bipolar) :定子磁极极性为两个方向,如永久磁铁式步进马达,其转子的极性和定子磁极极性有交互变化的需要。单一激磁线圈时其激磁方向为正负交替变化,两组磁极线圈时,一组正向激磁,另一组负向激磁,两组交替变化,使定子磁极极性变化。以双极方式运用,其电源较为复杂。双极性步进电机的驱动电路则如图2所示,它会使用八只晶体管来驱动两组相位。双极性驱动电路可以同时驱动四线式或六线式步进电机,虽然四线式电机只能使用双极性驱动电路,它却能大幅降低量产型应用的成本。双极性步进电机驱动电路的晶体管数目是单极性驱动电路的两倍,其中四颗下端晶体管通常是由微控制器直接驱动,上端晶体管则需要成本较高的上端驱动电路。双极性驱动电路的晶体管只需承受电机电压,所以它不像单极性驱动电路一样需要箝位电路。
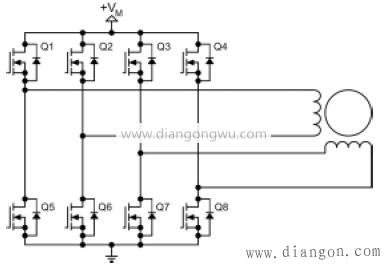
图2 双极性步进电机驱动电路
二相步进马达的激磁方式有下列两种:
(1).全步激磁
全步激磁方式又可分为1 相激磁与2相激磁两种方式,说明如下:
1相激磁
每次只激磁一相线圈,每输入一个脉波,便产生一步级的转,如图3所示,由图中可知,当激磁依A→B→A→B→A……相顺序,则马达顺时针方向旋转;若依B→A→B→A→B……相顺序激磁,则马达依逆时针方向旋转。此种激磁方式之优点为线圈消耗功率小,角精确度良好,但其转距小,加上阻尼特性不良,易失步。
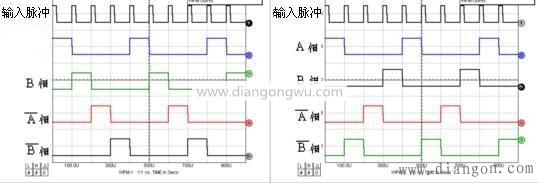
图3
2相激磁
每输入一个脉波,将有二相线圈激磁,如图4所示,由图中可知,若依AB→BA→AB→BA→AB……相顺序激磁,则马达顺时针方向旋转:若依BA→AB→BA→AB→BA……相顺序激磁,则马达转向为逆时针方向。此种激磁方式由于同时有两组线圈激磁,输出转距较大,加上阻尼效果良好,故能追踪较高的脉波率,但其缺点为耗电较大,容易发热。
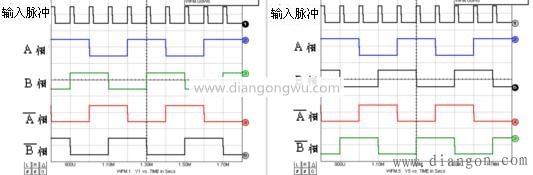
图4
(2)半步激磁
此种激磁方式又称1-2相激磁,激磁一相线圈和二相线圈交互进行,每加入一数字脉波所转动之角度为原步进角的一半,因此分辨率可提高一倍,且运转时相当平滑,故与2相激磁方式同受广泛使用。图5为二相步进马达采用1-2相激磁方式之时序图,由图中可知,若依照A→AB→B→BA→A→AB→B→BA→A→AB……相的顺序激磁,则步进马达将以顺时针方向旋转;但如果依照BA→A→AB→B→BA→A→AB→B→BA……相顺序激磁,则马达逆时针方向旋转
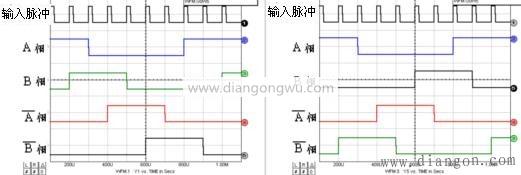
图5

图6 二相5线/6线步进电机内部接线图








