
与磁阻式步进电机一样,混合式电机也由定子和转子两部分组成。常见的定子有8个极或4个极,极面上均布一定数量的小齿,极上线圈能以两个方向通电,形成A相和A相,B相和B相。它的转子也由圆周上均布一定数量小齿的两块齿片等组成。这两块齿片相互错开半个齿距。两块齿片中间夹有一只轴向充磁的环形永久磁钢。很明显,同一段转子片上的所有齿都具有相同极性,而两块不同段的转子片的极性相反。图1是电机里两种磁场通路的示意图。
图1(a)是由转子上的永久磁钢磁场产生的磁通回路;图1(b)是在电机X、Y两处剖开的剖面图。每相绕组绕在8个定子磁极中的4个极上,如:绕组A绕在1、3、5、7磁极上,则绕组B绕在2、4、6、8磁极上;而且,每相相邻的磁极以相反方向绕,即,如果绕组A以正向电流激励,则3和7磁极的磁场径向向外,而l和5磁极的磁场径向向内。B相与A相的情况类似。因此,整个电机的通电情况与磁场方向可用表1概括。其电机里的转矩,由气隙中的两种磁场共同作用产生。
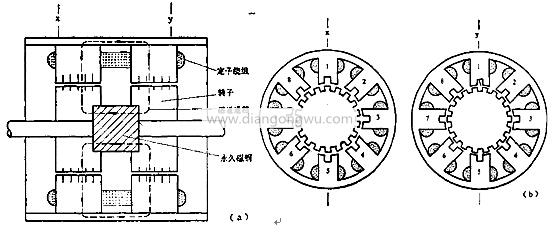
图1 混合式步进电机的剖面图
(a)平行轴的剖面 (b)垂直轴的剖面
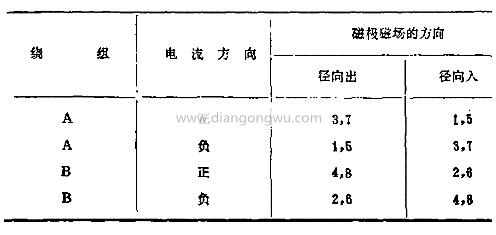
表1 电机的通电情况与磁场方向表
图2为四相混合式步进电机以圆周展开的剖面模型。上图是转子S极所处的剖面,下图是N极所处剖面。图中,定子齿距和转子齿距相同。先考虑磁极Ⅰ和磁极Ⅲ下面的磁场。定子线圈通电后,磁极Ⅰ产生N极,磁极Ⅲ产生S极。它们构成的磁场分布情况如实线所示。同一图中的虚线表示永久磁钢产生的磁通通路。
因为N极这段的转子齿和S极转子齿相互错开
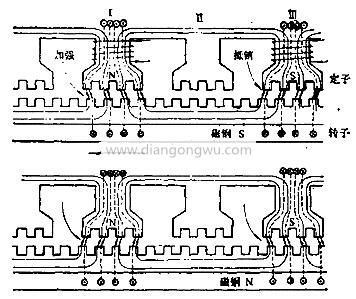
图2四相混合式步进电机工作原理剖面图
半个齿距,所以,仅靠定
子电流磁场并不能像磁阻式电机那样产生有意义的转矩。但是,把永久磁钢产生的磁场叠加上去,情况完全变了。因为磁极Ⅰ下面的两个磁场相互增强,因此,将产生朝左的驱动力;而磁极Ⅲ下而的两个分量相互抵销,向右的力大大削弱。同理下图中,磁极Ⅲ下面的定子磁场和转子磁场方向相同,磁极Ⅰ下面的磁场方向相反,所以,也产生同样方向的力,最终得到向左的合力。转子在驱动力的作用下,将转过1/4齿距,驱动力降为零,达到平衡位置。
如果切断磁极Ⅰ、Ⅲ的激磁,同时向磁极Ⅱ、Ⅳ的线圈通入电流,分别产生S极和N极。转子将向左再走一步。按照特定的时序激磁,如:A—B—A—B—A一…,电机就能沿逆时针方向连续旋转。改变激磁时序,以A—B—A—B—A一…激磁,电机将沿顺时针方向连续旋转。
典型的混合式步进电机是四相200步的电机,步距角为1.8°;当然,也有象3.6°、2°或5°步距角的混合式电机。混合式电机的一个完整激磁周期常由四个状态组成,转子转动四步。这时,步距角θb为:θb=360/(mz ) (°)
可将混合式电机与磁阻式电机作一比较。系统设计者选用哪种电机全由应用决定。说某种型式绝对好,这是不妥当的。(http://www.diangongwugwu.com/版权所有)通常,对给定的电机体积,混合式电机产生的转矩比磁阻式电机大;加上混合式电机的步距角常做得较小,因此,在工作空间受到限制而需要小步距角和大转矩的应用中,常常可选用混合式电机。混合式电机的绕组未受激磁时,永久磁钢所产生的磁通能产生自定位转矩。虽然这比一组或多组绕组激磁时的转距小很多,但它确实是一种很有用的特性:供电切断时,仍然能保持转子的原来位置。磁阻式步进电机,因为它的转子上没有永久磁钢,所以,转子的机械惯量比混合式电机的转子惯量低。因为转子惯量常常是电机总惯量的主要部分,因此,转子惯量小,可以更快加速。此外,当负载需要移动相当大距离时,如电机转几转,则使用大步距角的磁阻式电机可以减少步数。








