
下图为全数字控制伺服系统的原理图。图中,电流环、位置环均设有数字化测量传感器;速度环的测量也是数字化测量,它是通过位置测量传感器得出(这是一种常用方法,如使用脉冲编码器就能做到两用)。从田中还可以看到,速度控制和电流控制是由专用CPU(在图中 “进给控制”框)完成。位置反馈、比较等处理工作通过高速通讯总线由“位控CPU”完成。其位置偏差再由通讯总线传给速度环。此外,各种参数控制及调节也由微处理器实现,特别是正弦脉宽调制变频器的矢量变换控制更是由微处理器完成。
全数字控制伺服系统
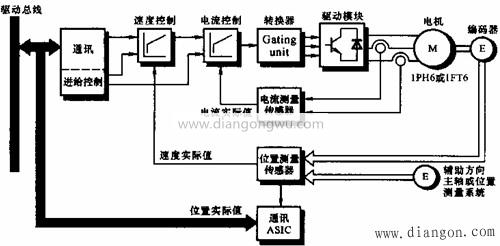
下图为全数字控制伺服系统的原理图。图中,电流环、位置环均设有数字化测量传感器;速度环的测量也是数字化测量,它是通过位置测量传感器得出(这是一种常用方法,如使用脉冲编码器就能做到两用)。从田中还可以看到,速度控制和电流控制是由专用CPU(在图中 “进给控制”框)完成。位置反馈、比较等处理工作通过高速通讯总线由“位控CPU”完成。其位置偏差再由通讯总线传给速度环。此外,各种参数控制及调节也由微处理器实现,特别是正弦脉宽调制变频器的矢量变换控制更是由微处理器完成。
全数字控制伺服系统
上一篇:步进电动机的通电方式和步距角
下一篇:步进电动机的驱动电路








