伺服电机电子齿轮比计算方法
电子齿轮比主要功能:
可以任意地设置每单位指令脉冲对应的电机的速度和位移量(脉冲当量);
当上位控制器的脉冲发生能力(最高输出频率)不足以获得所需速度时,可以通过电子齿轮功能(指令脉冲倍频)来对指令脉冲进行×N倍频;
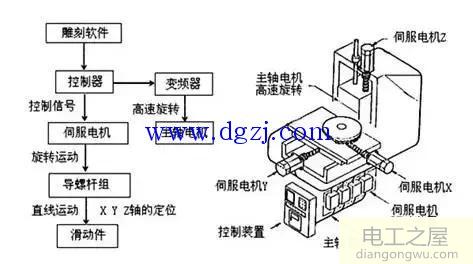
当伺服电机用在电脑绣花机的框架上时,控制上的要求为主控发送1个脉冲框架得移动0.1mm。对电子齿轮比的计算有影响的主要为以下几个因素:电机编码器的分辨率;机械装置的二级传动比;框架皮带齿轮大小。
电机编码器的分辨率:伺服电机的编码器一般为2000线或者是2500线,也就是转一圈能产生2000或者2500个脉冲,而伺服驱动器对此脉冲进行4倍频处理,所以电机转一圈就能产生8000或者10000个脉冲,也就是分辨率为8000或者10000。

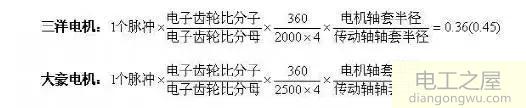
以三洋伺服电机为例:当控制器给驱动器发送一个脉冲时,伺服电机转过的角度为

机械装置的二级传动比:机械装置二级传动比为电机轴和传动轴的比值
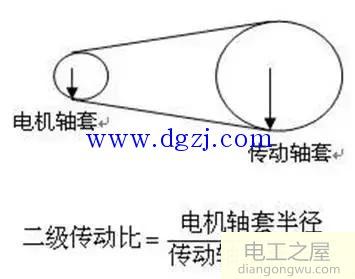
经过二级传动装置后,框架运动的角度折算到电机上角度和二级传动比是成反比的,比如二级传动比为1/4,那么电机转过的角度就是传动轴转过的4倍。
框架齿轮大小:
目前市场上主要有两种齿轮:绣框移动0.1mm时所需转过的角度为0.36°和0.45°。大部分机器都是采用0.36°的齿轮。
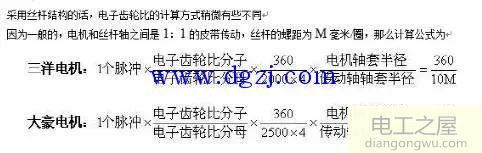
综上所述可以得知电子齿轮比的公式如下