
1、步进电机控制系统如图:
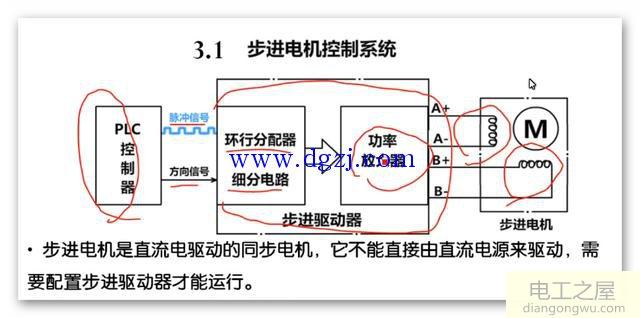
左边PLC控制器它给我们的步进驱动器提供一个脉冲信号、脉冲的数量、脉冲的频率、方向信号,进入步进驱动器之后 ,它经过环形分配器和细分电路处理,再经过功率放大器把信号放大,我在给大家介绍PLC的时候就讲过,PLC它输出的脉冲信号是比较小的,它必须要经过步进驱动器放大脉冲信号之后才能驱动步进电机转动。这个步进电机它是不能直接接直流电原来驱动它的,如24V、48V,这样是不行的,下面呢给大家看一下这个拆开的实物,如图2:

内部电路板,左边是小功率的,右边呢是大功率的,也是智能化的,它带有CPU,因为它要带编码器执行闭环控制,接这个编码器的脉冲信号,我们再看一下它的外观,我之所以要这样给大家讲,是因为现在市面上好多的设备外观比较相似,容易混淆,所以我们必须要把它搞清楚,如图3:

这就是它的外观了,第一个:步进伺服驱动器,这个步进伺服,就是说:它有反馈,步进电动机装有编码器,这个编码器它的A相、B相就反馈到我们的伺服驱动器了,这样就形成了闭环控制。第二个呢是不带编码器反馈的。2、步进驱动器的作用:我们说了步进电动机不能用直流电直接带动,必须由驱动器来带动它,步进驱动器接收到上位机的脉冲信号,由驱动器内部的环形分配器按一定的顺序去出发功能放大器的功率元件,来控制步进电机的绕组不断的通断直流电(就是A相线圈、B相线圈不断的通断电,也就是持续的交替通电),使我们的电动机转动。下面我们再看一个图,如图4:
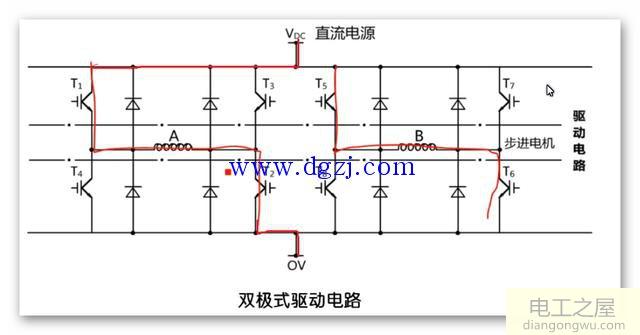
这个图呢就是功率放大器的工作原理图,这个伺服步进驱动器它给出来这个T1就导通,T2导通用这个IGBT,现在用这个IGBT的比较多了,直流电源DC正极流向T1再通过那个A线圈,流向T2一直流向0V,这是给的直流电,它马上就产生磁场了,它就吸引这个转子转动一定的角度,那么给A线圈通完电后,我们下一步给B线圈通电,但是呢,有很多步进电机它是A线圈、B线圈同时通电,再有细分的情况下它给的电流呢,是不一样的,比如A线圈的电流是4各单位,B线圈的电流是0各单位,如果我们把A线圈的电流减去3各单位,那么B线圈的电流就变成了一个单位,这样呢就是它的细分,这样就是说我同时给它供电,用这个步进驱动器来控制这个电流的大小,来达到步进的目的,就是给A线圈通完电之后又给B线圈通电,完了有反向通电,如下图,图5:
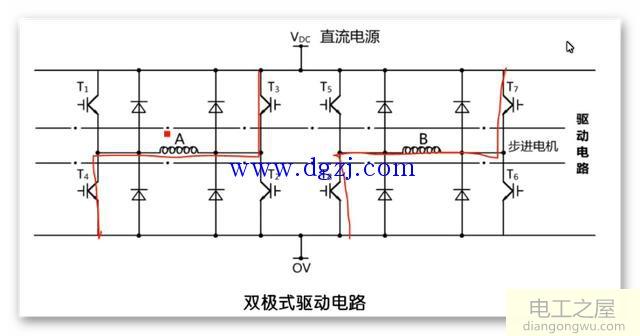
这就是反向通电,这个呢是在没有细分的情况下才这麽做的,我们再看下面这个图,如图6:
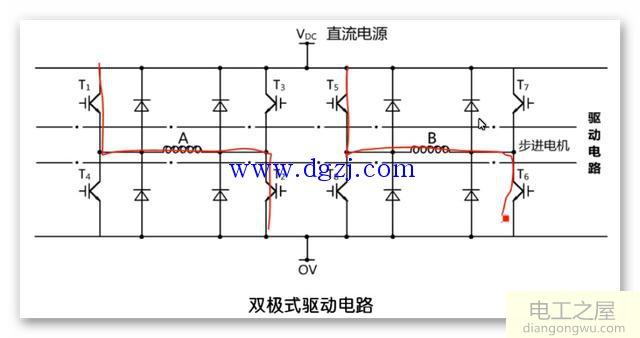
它一旦有细分了,我给A线圈通电,通完电之后,也给B线圈通电,它们通电的比例不一样,那么我们就达到细分的目的了,这些呢都是伺服驱动器它本身来完成的,不用管它,但你要由细分开关设置它的细分,设置完了,究竟是A线圈先通电、还是B线圈先通电,通电的比例多大你就不用管它了,它会自动形成,那大家只需要关心给它的脉冲的频率和脉冲的个数多少,我们用PLC设置参数定位的时候要把这些参数设置了,后面的工作都是步进驱动器它自动完成的,但我们要知道它的这个原理。








