
►包含雪崩光电探测器(APD)的光传感器和整个信号链的模拟前端(AFE)电路板,信号链用于调谐APD输出信号,以便能馈入DAQ板上的ADC。
►包含激光器和驱动电路的激光器板。
和以往一样,在系统设计中,模块化意味着灵活性,但它也有一些缺点,比如复杂性增加、性能下降和成本增加,在决定系统分区时必须全面评估这些缺点。在这种情况下,系统被分成三个板,原因如下:
►无论使用哪种模拟前端,选择哪种激光器解决方案,ADC和时钟很可能保持不变。
►模拟前端硬件设计和尺寸根据所选的APD、整体的系统接收灵敏度,以及选择的光学器件而变化。
►激光器板设计和尺寸根据所选的照明解决方案和光学器件而变化。
►对于接收器和发射器的位置和方向,系统提供很大的灵活性,以便它们彼此对应或和其他目标对应,因此使用柔性电缆来传输数字信号,使用同轴电缆来传输两个电路板之间的模拟信号。
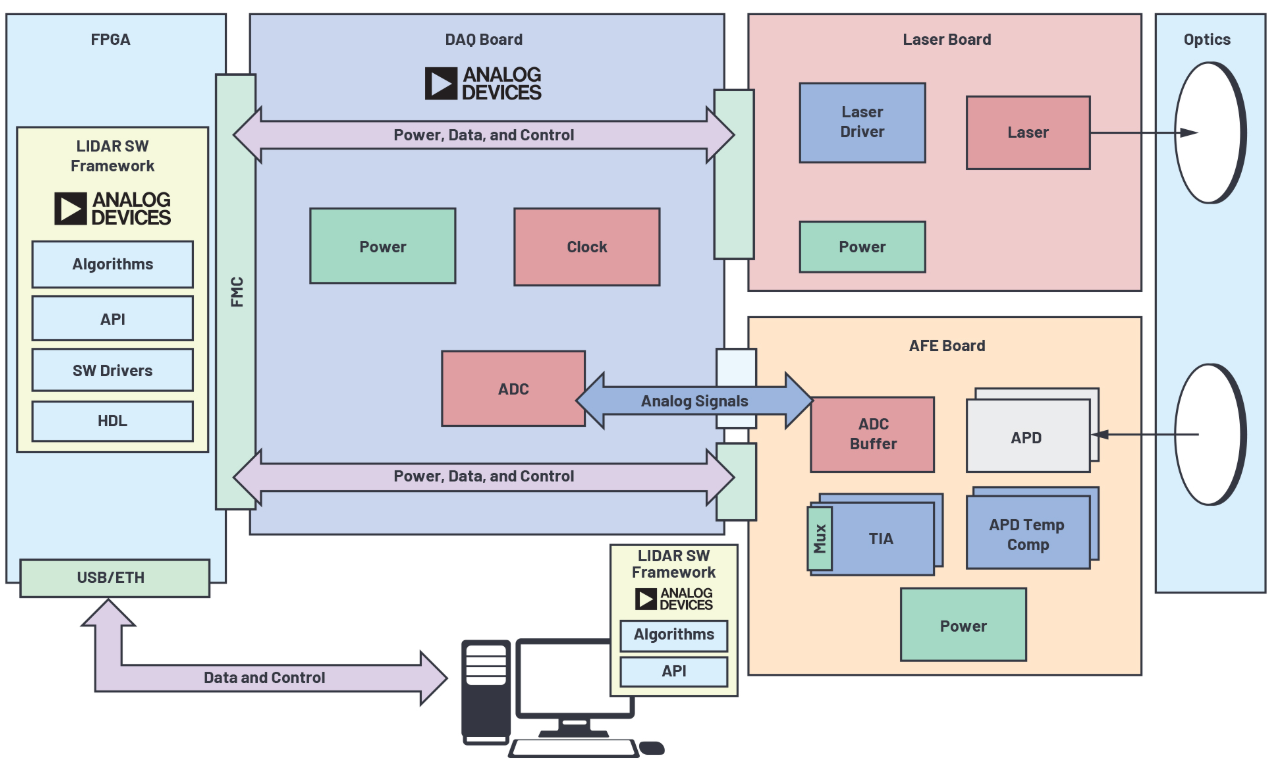
图1.LIDAR平台系统设计。

图2.产品开发周期。
包含硬件设计的软件堆栈以分层方法为基础,以少数几个层级区分为适用于特定操作系统的驱动和接口、系统特定的API和应用层。这使得堆栈的上层可以保持不变,无论软件是在嵌入式目标上运行,还是在通过网络或USB连接与系统通信的PC上运行。如图2所示,在不同的产品开发阶段,这一点非常有用,因为这意味着将系统连接至PC以简化开发时,在原型制作期间开发的同样的应用软件可轻松部署到嵌入式系统中,甚至无需触碰低层接口。
硬件设计
LIDAR传感器通过测量光脉冲到达目标并返回的时间来计算与目标之间的距离。测量时间时,以ADC 采样数据为增量, 这里ADC采样速率决定了系统对接收的光脉冲采样时的分辨率。公式1显示如何根据ADC采样速率计算距离。

其中:
L









