
(1)脉冲ToF系统几乎总是需要使用外部模拟前端来数字化和输出深度数据(尽管连续波系统也可能需要使用外部处理器,但这取决于后端处理的复杂度)。
(2)该系统的配置(特别是ToF传感器的电源要求)需要使用更多的组件和电源轨。
其他深度传感技术
熟悉其他深度传感技术对理解不同方案的优缺点非常有帮助;如前所述,根据用例和应用要求,所有深度传感系统各有优缺点。
立体视觉
要使用立体视觉进行深度测量,需要用到多个相机,彼此之间相隔一定距离(图6)。就像人眼一样,会在空间中给每个相机一个参考点,这些点相互独立,因此如果在两个相机之间能够对应还原这些点的坐标,系统就能够计算这些点的位置。确定这种对应关系需要用到高强度且复杂的算法。
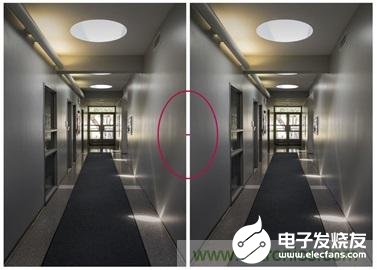
图6. 使用立体视觉的3D深度测量
优点
● 无需主动发光
● 它只需要使用两个相机来获取数据,因此价格更便宜(虽然可能需要使用一个复杂的应用处理器来找到对应的点,并生成3D图像)。
缺点
● 如果两个相机之间的对应点没有差别对比,则无法计算距离。对于白墙环境(因为两个相机显示的内容之间没有差异)和环境光不足的环境,这个问题就会凸显出来。
● 距离更远时,两个相机彼此之间应该相距更远,以便对应的点位于两个相机的不同位置。对于需要测量更远距离的应用,尺寸成为明显的问题。
结构光
结构光的工作原理是将已知的参考点图投射到三维物体上,参考点图经过物体高度调制产生变形,被调制的光信息被2D相机采集捕捉,然后将调制后的光信息与投射的参考点图做对比,基于调制水平计算出深度图。
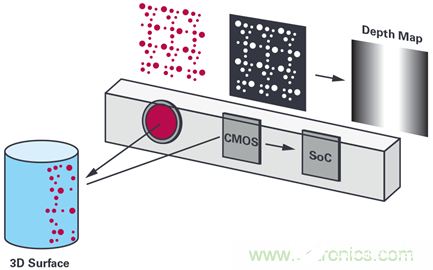
图7. 使用结构光方法的深度传感图解。
优点
● 能够在近距离内(《 2米)实现非常高的空间分辨率和非常高的精度。
缺点
● 提取一帧信息需要多次投影,这可能会降低帧速率,导致从移动对象中提取距离信息变得非常困难。
● 对于远距离探测,光源需要远离相机镜头,因为如果光源距离镜头太近,可能导致无法识别图像变形。对于需要小尺寸外形的应用,这可能不太合适。因此,当深度测量应用的距离大于2米时,一般不使用结构光方法。
● 室外环境光也可能干扰图像调制,所以结构光更加适合在室内使用。









