传统的机床是串联运动机构,每个构件的位移或转动都是独立的,它的工作空间是线性的,通常取决于构件在X、Y、Z坐标方向的位移叠加,是一个矩形空间。与传统机床不同,并联机床的工作空间是各支链工作子空间的交集,一般是由多张空间曲面片围成的闭包,类似于蘑菇形或蒜头状。为了适合多坐标数控作业的需要,通常将灵活(巧)度工作空间的规则内接几何形体定义为机床的编程工作空间。对于纯6自由度并联机床,用动平台实现位置和姿态的能力是相互耦合的,即随着姿态的增加,工作空间逐渐缩小。
hexact型(卧式五坐标高速铣床机床)设计布局合理。由于6根伸缩杆的配置在所有方向都具有对称性,因此它的工作空间也是对称的,呈近似的六面柱体。通过计算机仿真后的机床工作空间如图,它与其他的并联机床相比具有明显的优点,特别是工作空间与机床外形尺寸相对较大。
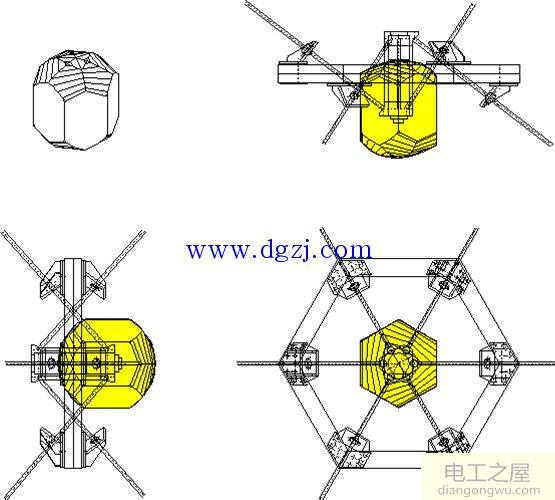
图7.20 hexact型机床的工作空间