
开环控制数控机床 见图1所示
特点:结构简单,步进驱动、步进电机,无位置速度反馈。
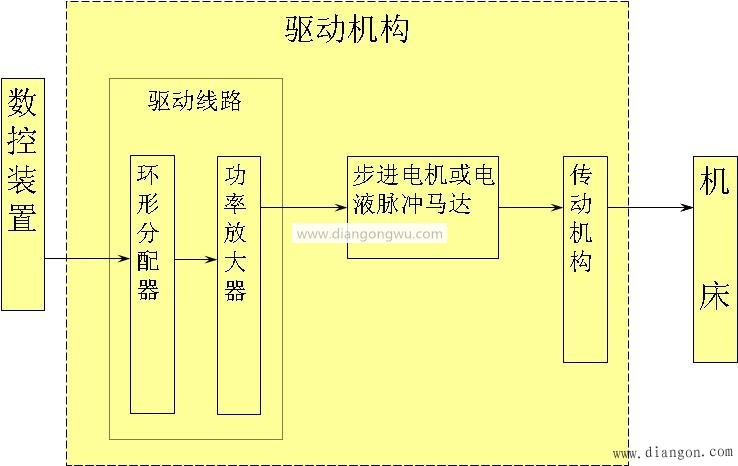
图1 开环控制伺服驱动系统
1. 结构
电机的定子和转子铁心通常由硅钢片叠成。定子和转子均匀分布着很多小齿。定子上有A、B、C三对磁极,在相对应的磁极上绕有A、B、C三向控制绕组。其几何轴线依次分别与转子齿轴线错开。见图2-5-6所示。
2. 工作原理
步进电动机是一种把电脉冲转换成角位移的电动机。用专用的驱动电源向步进电动机供给一系列的且有一定规律的电脉冲信号,每输入一个电脉冲,步进电机就前进一步,其角位移与脉冲数成正比,电机转速与脉冲频率成正比,而且转速和转向与各相绕组的通电方式有关。
3. 步进电机的通电方式
其运行方式有:三相单三拍、三相双三拍和三相六拍。
每输入一个脉冲信号步进电动机所转过的角度称为步距角,以θs表示。
步距误差是指步进电机运行时,转子每一步实际转过的角度与理论步距角之差值。
4. 步进电机功率驱动
驱动控制电路由环形分配器和功率放大器组成。
1)环形分配器
环形分配器是用于控制步进电机的通电方式的,其作用是将数控装置送来的一系列指令脉冲按照一定的顺序和分配方式加到功率放大器上,控制各相绕组的通电、断电。环形分配器功能可由硬件或软件产生。见图2、3所示。
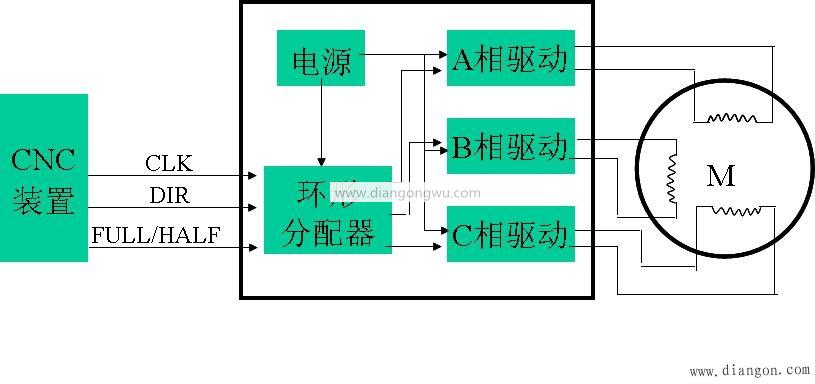
图2 三相硬件环形分配器的驱动控制
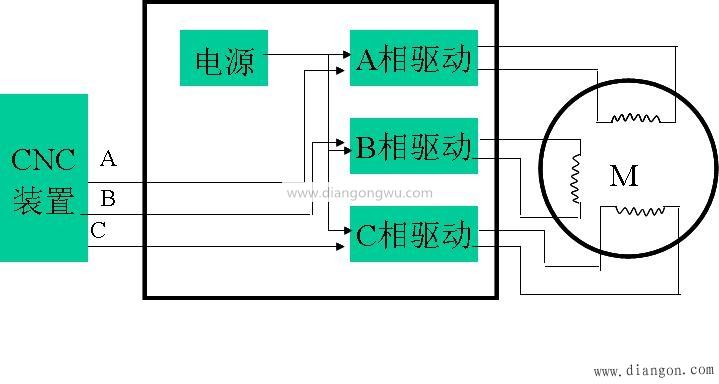
图3 三相软件环形分配器的驱控制
2)驱动放大电路
图4是一种高低压驱动线路。
特点:
高压充电,低压维持。
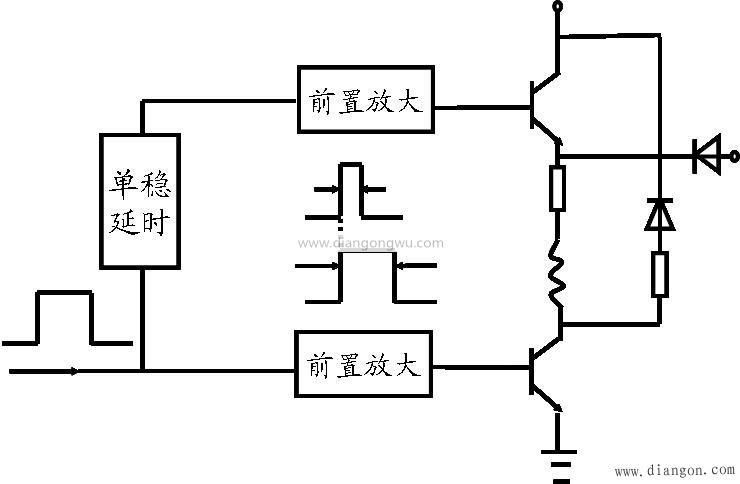
图4 高低压驱动原理
5. 主要特征
1)最大静转矩Tmax
2)启动频率
3)连续运行频率
4)矩频特性
5)静态步矩误差
6. 步进电机的选择
步进电机有步距角(涉及到相数)、静转矩、及电流三大要素组成。一旦三大要素确定,步进电机的型号便确定下来了。








