
与基于SAR ADC的系统一样,必须确保复位滤波脉冲同时到达各个子系统。
但是,请注意,数字滤波器每次复位时,数据流都会被中断,这是因为滤波器必须重新设置。在本例中,数据中断的持续时间由数字滤波器的顺序、fMOD和抽取率决定。在图6显示的示例中,滤波器的LPF特性将延迟时间,直到生成有效的输出。
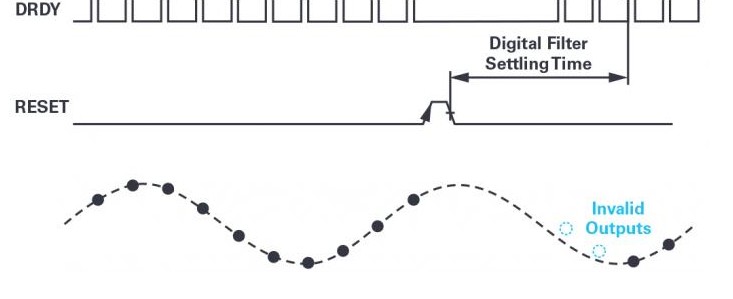
图6.由于数字滤波器的建立时间导致的数据中断。
对分布式系统同步采样的启示
在分布式系统中,全局同步信号(我们称之为Global_SYNC)在所有模块/子系统之间共享。此同步信号可以由主系统或第三方系统(例如GPS 1pps)生成,如图1所示。
接收到Global_SYNC信号后,每个模块必须重新同步每个转换器的瞬时采样(很可能是其本地时钟),以确保同时性。
在基于SAR ADC的分布式系统中,重新同步本质上很简单,如前一节所述:本地时钟(管理转换开始信号)再次与Global_SYNC信号匹配,之后同步获得信号。
这意味着要生成频率杂散,因为在同步期间,会在不同时间和距离采集一个样本,具体如图7高亮蓝色部分所示。在分布式应用中,这些杂散可能是可以接受的,而中断数据流在某些应用中则确实至关重要,例如前面提到的电力线监视之类的应用。
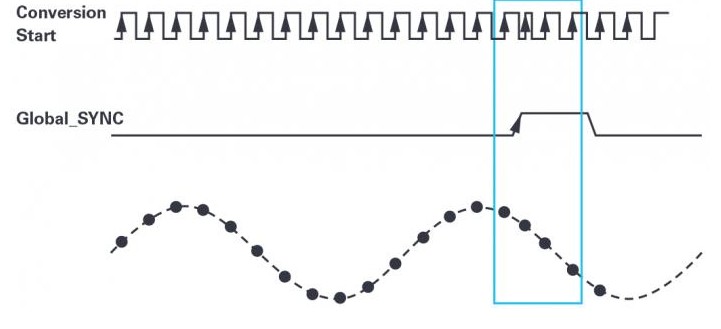
图7.调整SAR ADC转换过程,使之与全局同步信号匹配。
在基于∑-∆的分布式系统中,重新与Global_SYNC信号同步的过程会稍微复杂一些,这是因为调制器会持续对模拟输入信号采样,而转换过程也不像SAR ADC一样从外部控制。
要对多个基于∑-∆的分布式系统实施同步,一个简单的方法就是重置数字滤波器:丢弃收集和存储的要在平均滤波器上使用的所有调制器示例,并且清空数字滤波器。这意味着:根据数字滤波器的顺序,它需要一些时间才能再次确定其输出,如图5和图6所示。
数字滤波器完成设置之后,会再次提供有效的转换数据,但考虑到设置所花费的时间,在Σ-ΔADC上重置数字滤波器可能导致的数据中断是不可接受的。分布式系统需要重新同步的频率越高,数据流中断的次数就越多,而因为这种持续的数据流中断,Σ-ΔADC将无法应用于关键的分布式系统中。
传统使用的最小化数据中断的方法是使用可调谐时钟,例如PLL,它可以降低全局同步频率和fMOD频率之间的误差。









